 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNighttime Dehaze-Enhancement
Oct 18, 2022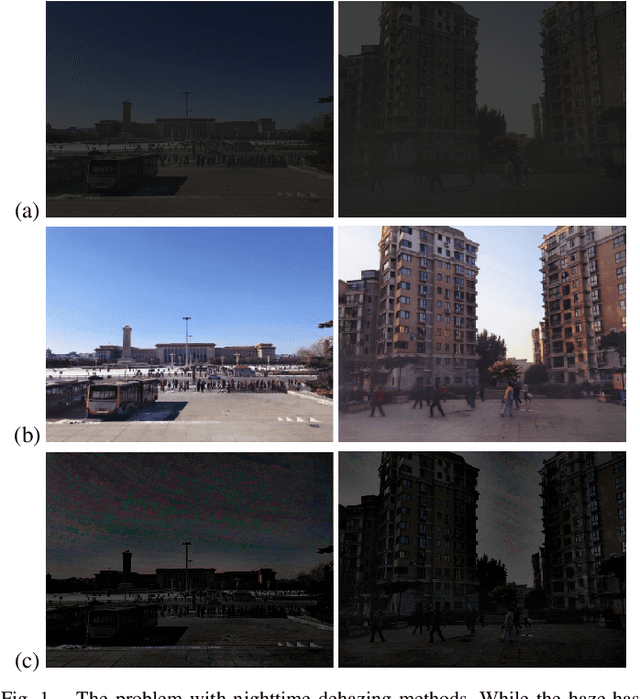
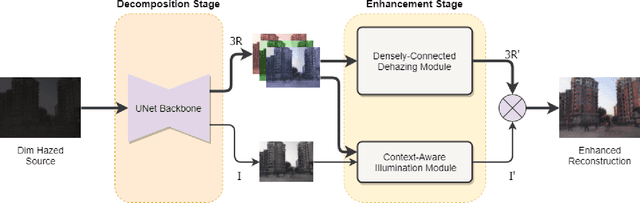
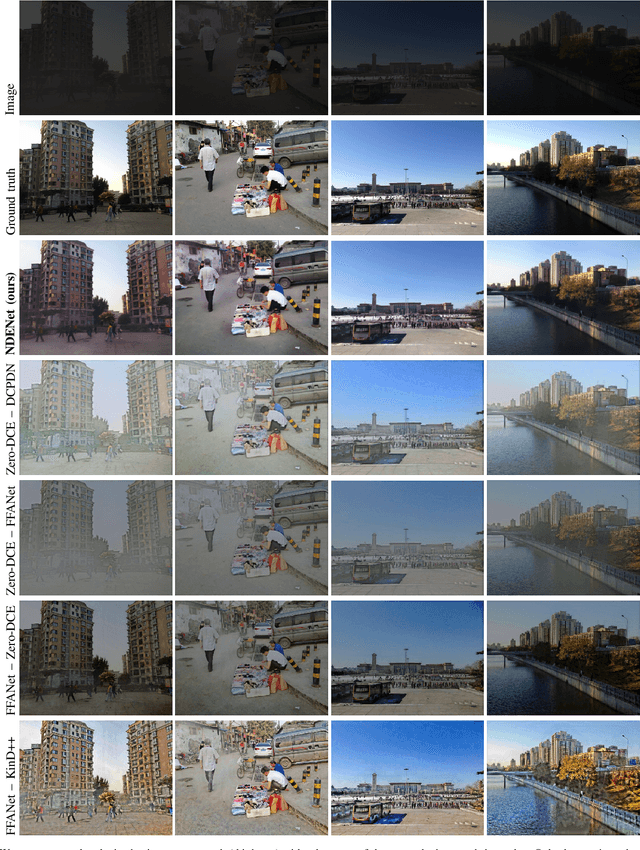
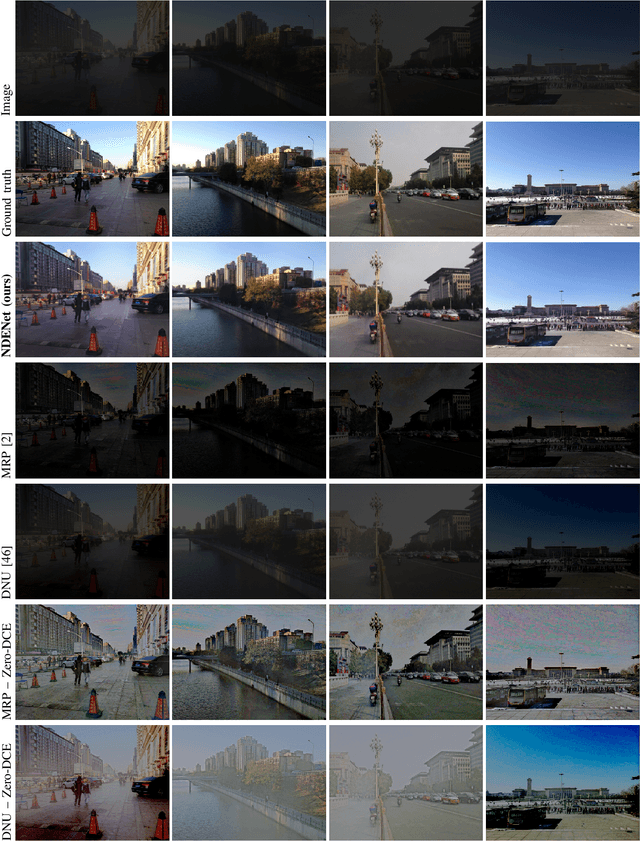
In this paper, we introduce a new computer vision task called nighttime dehaze-enhancement. This task aims to jointly perform dehazing and lightness enhancement. Our task fundamentally differs from nighttime dehazing -- our goal is to jointly dehaze and enhance scenes, while nighttime dehazing aims to dehaze scenes under a nighttime setting. In order to facilitate further research on this task, we release a new benchmark dataset called Reside-$\beta$ Night dataset, consisting of 4122 nighttime hazed images from 2061 scenes and 2061 ground truth images. Moreover, we also propose a new network called NDENet (Nighttime Dehaze-Enhancement Network), which jointly performs dehazing and low-light enhancement in an end-to-end manner. We evaluate our method on the proposed benchmark and achieve SSIM of 0.8962 and PSNR of 26.25. We also compare our network with other baseline networks on our benchmark to demonstrate the effectiveness of our approach. We believe that nighttime dehaze-enhancement is an essential task particularly for autonomous navigation applications, and hope that our work will open up new frontiers in research. Our dataset and code will be made publicly available upon acceptance of our paper.
Dense Residual Networks for Gaze Mapping on Indian Roads
Mar 22, 2022
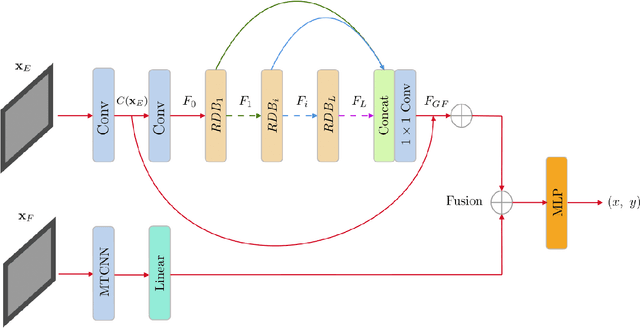
In the recent past, greater accessibility to powerful computational resources has enabled progress in the field of Deep Learning and Computer Vision to grow by leaps and bounds. This in consequence has lent progress to the domain of Autonomous Driving and Navigation Systems. Most of the present research work has been focused on driving scenarios in the European or American roads. Our paper draws special attention to the Indian driving context. To this effect, we propose a novel architecture, DR-Gaze, which is used to map the driver's gaze onto the road. We compare our results with previous works and state-of-the-art results on the DGAZE dataset. Our code will be made publicly available upon acceptance of our paper.