 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Turn Reinforcement Learning for Tool-Calling Agents with Iterative Reward Calibration
Apr 03, 2026Training tool-calling agents with reinforcement learning on multi-turn tasks remains challenging due to sparse outcome rewards and difficult credit assignment across conversation turns. We present the first application of MT-GRPO (Multi-Turn Group Relative Policy Optimization) combined with GTPO (Generalized Token-level Policy Optimization) for training a tool-calling agent on realistic customer service tasks with an LLM-based user simulator. Through systematic analysis of training rollouts, we discover that naively designed dense per-turn rewards degrade performance by up to 14 percentage points due to misalignment between reward discriminativeness and advantage direction. We introduce Iterative Reward Calibration, a methodology for designing per-turn rewards using empirical discriminative analysis of rollout data, and show that our GTPO hybrid advantage formulation eliminates the advantage misalignment problem. Applied to the Tau-Bench airline benchmark, our approach improves Qwen3.5-4B from 63.8 percent to 66.7 percent (+2.9pp) and Qwen3-30B-A3B from 58.0 percent to 69.5 percent (+11.5pp) -- with the trained 4B model exceeding GPT-4.1 (49.4 percent) and GPT-4o (42.8 percent) despite being 50 times smaller, and the 30.5B MoE model approaching Claude Sonnet 4.5 (70.0 percent). To our knowledge, these are the first published RL training results on Tau-Bench. We release our code, reward calibration analysis, and training recipes.
ROAD: Reflective Optimization via Automated Debugging for Zero-Shot Agent Alignment
Dec 30, 2025Automatic Prompt Optimization (APO) has emerged as a critical technique for enhancing Large Language Model (LLM) performance, yet current state-of-the-art methods typically rely on large, labeled gold-standard development sets to compute fitness scores for evolutionary or Reinforcement Learning (RL) approaches. In real-world software engineering, however, such curated datasets are rarely available during the initial cold start of agent development, where engineers instead face messy production logs and evolving failure modes. We present ROAD (Reflective Optimization via Automated Debugging), a novel framework that bypasses the need for refined datasets by treating optimization as a dynamic debugging investigation rather than a stochastic search. Unlike traditional mutation strategies, ROAD utilizes a specialized multi-agent architecture, comprising an Analyzer for root-cause analysis, an Optimizer for pattern aggregation, and a Coach for strategy integration, to convert unstructured failure logs into robust, structured Decision Tree Protocols. We evaluated ROAD across both a standardized academic benchmark and a live production Knowledge Management engine. Experimental results demonstrate that ROAD is highly sample-efficient, achieving a 5.6 percent increase in success rate (73.6 percent to 79.2 percent) and a 3.8 percent increase in search accuracy within just three automated iterations. Furthermore, on complex reasoning tasks in the retail domain, ROAD improved agent performance by approximately 19 percent relative to the baseline. These findings suggest that mimicking the human engineering loop of failure analysis and patching offers a viable, data-efficient alternative to resource-intensive RL training for deploying reliable LLM agents.
Cloning a Conversational Voice AI Agent from Call\,Recording Datasets for Telesales
Sep 05, 2025Recent advances in language and speech modelling have made it possible to build autonomous voice assistants that understand and generate human dialogue in real time. These systems are increasingly being deployed in domains such as customer service and healthcare care, where they can automate repetitive tasks, reduce operational costs, and provide constant support around the clock. In this paper, we present a general methodology for cloning a conversational voice AI agent from a corpus of call recordings. Although the case study described in this paper uses telesales data to illustrate the approach, the underlying process generalizes to any domain where call transcripts are available. Our system listens to customers over the telephone, responds with a synthetic voice, and follows a structured playbook learned from top performing human agents. We describe the domain selection, knowledge extraction, and prompt engineering used to construct the agent, integrating automatic speech recognition, a large language model based dialogue manager, and text to speech synthesis into a streaming inference pipeline. The cloned agent is evaluated against human agents on a rubric of 22 criteria covering introduction, product communication, sales drive, objection handling, and closing. Blind tests show that the AI agent approaches human performance in routine aspects of the call while underperforming in persuasion and objection handling. We analyze these shortcomings and refine the prompt accordingly. The paper concludes with design lessons and avenues for future research, including large scale simulation and automated evaluation.
Online estimation of the hand-eye transformation from surgical scenes
Jun 04, 2023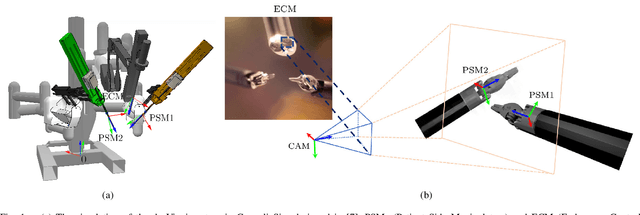

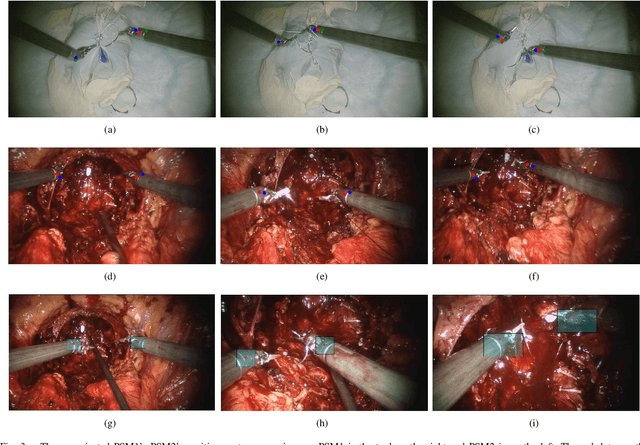
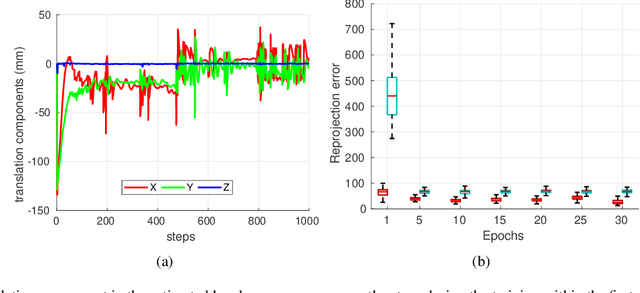
Hand-eye calibration algorithms are mature and provide accurate transformation estimations for an effective camera-robot link but rely on a sufficiently wide range of calibration data to avoid errors and degenerate configurations. To solve the hand-eye problem in robotic-assisted minimally invasive surgery and also simplify the calibration procedure by using neural network method cooporating with the new objective function. We present a neural network-based solution that estimates the transformation from a sequence of images and kinematic data which significantly simplifies the calibration procedure. The network utilises the long short-term memory architecture to extract temporal information from the data and solve the hand-eye problem. The objective function is derived from the linear combination of remote centre of motion constraint, the re-projection error and its derivative to induce a small change in the hand-eye transformation. The method is validated with the data from da Vinci Si and the result shows that the estimated hand-eye matrix is able to re-project the end-effector from the robot coordinate to the camera coordinate within 10 to 20 pixels of accuracy in both testing dataset. The calibration performance is also superior to the previous neural network-based hand-eye method. The proposed algorithm shows that the calibration procedure can be simplified by using deep learning techniques and the performance is improved by the assumption of non-static hand-eye transformations.