 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign Space Exploration of Embedded SoC Architectures for Real-Time Optimal Control
Oct 16, 2024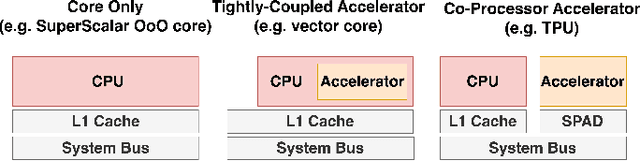
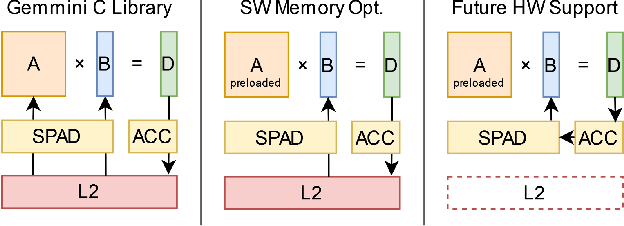
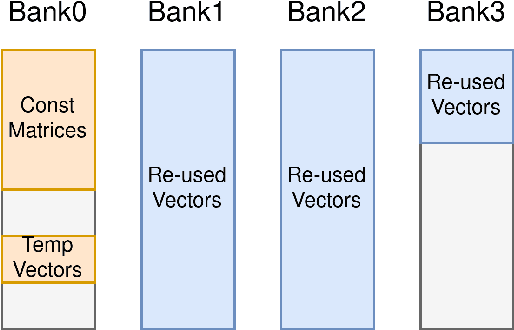
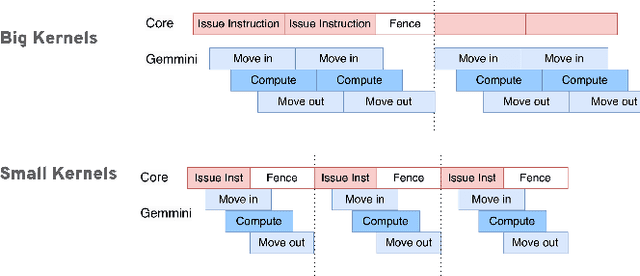
Empowering resource-limited robots to execute computationally intensive tasks like model/learning-based algorithms is challenging. Due to the complexity of the workload characteristic, the bottlenecks in different systems can depend on application requirements, preventing a single hardware architecture from being adequate across all robotics applications. This project provides a comprehensive design space exploration to determine optimal hardware computation platforms and architectures suitable for robotic algorithms. We profile and optimize representative architectural designs across general-purpose cores and specialized accelerators. Specifically, we compare CPUs, vector machines, and domain-specialized accelerators with kernel-level benchmarks and end-to-end representative robotic workloads. Our exploration provides a quantitative performance, area, and utilization comparison and analyzes the trade-offs between these representative distinct architectural designs. We demonstrate that the variation of hardware architecture choices depends on workload characteristics and application requirements. Finally, we explore how architectural modifications and software ecosystem optimization can alleviate bottlenecks and enhance utilization.