 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA New Approach to Complex Dynamic Geofencing for Unmanned Aerial Vehicles
Oct 18, 2021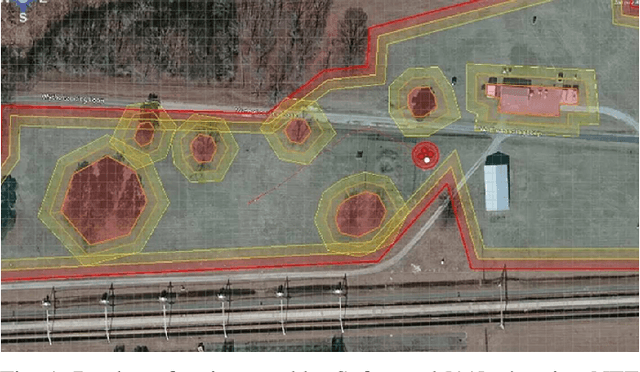
The anticipated widespread use of unmanned aerial vehicles (UAVs) raises significant safety and security concerns, including trespassing in restricted areas, colliding with other UAVs, and disrupting high-traffic airspaces. To mitigate these risks, geofences have been proposed as one line of defence, which limit UAVs from flying into the perimeters of other UAVs and restricted locations. In this paper, we address the concern that existing geometric geofencing algorithms lack accuracy during the calculation of complex geofences, particularly in dynamic urban environments. We propose a new algorithm based on alpha shapes and Voronoi diagrams, which we integrate into an on-drone framework using an open-source mapping database from OpenStreetMap. To demonstrate its efficacy, we present performance results using Microsoft's AirSim and a low-cost commercial UAV platform in a real-world urban environment.
Deep Learning Application in Security and Privacy -- Theory and Practice: A Position Paper
Dec 01, 2018Technology is shaping our lives in a multitude of ways. This is fuelled by a technology infrastructure, both legacy and state of the art, composed of a heterogeneous group of hardware, software, services and organisations. Such infrastructure faces a diverse range of challenges to its operations that include security, privacy, resilience, and quality of services. Among these, cybersecurity and privacy are taking the centre-stage, especially since the General Data Protection Regulation (GDPR) came into effect. Traditional security and privacy techniques are overstretched and adversarial actors have evolved to design exploitation techniques that circumvent protection. With the ever-increasing complexity of technology infrastructure, security and privacy-preservation specialists have started to look for adaptable and flexible protection methods that can evolve (potentially autonomously) as the adversarial actor changes its techniques. For this, Artificial Intelligence (AI), Machine Learning (ML) and Deep Learning (DL) were put forward as saviours. In this paper, we look at the promises of AI, ML, and DL stated in academic and industrial literature and evaluate how realistic they are. We also put forward potential challenges a DL based security and privacy protection technique has to overcome. Finally, we conclude the paper with a discussion on what steps the DL and the security and privacy-preservation community have to take to ensure that DL is not just going to be hype, but an opportunity to build a secure, reliable, and trusted technology infrastructure on which we can rely on for so much in our lives.
Security, Privacy and Safety Evaluation of Dynamic and Static Fleets of Drones
Aug 18, 2017



Inter-connected objects, either via public or private networks are the near future of modern societies. Such inter-connected objects are referred to as Internet-of-Things (IoT) and/or Cyber-Physical Systems (CPS). One example of such a system is based on Unmanned Aerial Vehicles (UAVs). The fleet of such vehicles are prophesied to take on multiple roles involving mundane to high-sensitive, such as, prompt pizza or shopping deliveries to your homes to battlefield deployment for reconnaissance and combat missions. Drones, as we refer to UAVs in this paper, either can operate individually (solo missions) or part of a fleet (group missions), with and without constant connection with the base station. The base station acts as the command centre to manage the activities of the drones. However, an independent, localised and effective fleet control is required, potentially based on swarm intelligence, for the reasons: 1) increase in the number of drone fleets, 2) number of drones in a fleet might be multiple of tens, 3) time-criticality in making decisions by such fleets in the wild, 4) potential communication congestions/lag, and 5) in some cases working in challenging terrains that hinders or mandates-limited communication with control centre (i.e., operations spanning long period of times or military usage of such fleets in enemy territory). This self-ware, mission-focused and independent fleet of drones that potential utilises swarm intelligence for a) air-traffic and/or flight control management, b) obstacle avoidance, c) self-preservation while maintaining the mission criteria, d) collaboration with other fleets in the wild (autonomously) and e) assuring the security, privacy and safety of physical (drones itself) and virtual (data, software) assets. In this paper, we investigate the challenges faced by fleet of drones and propose a potential course of action on how to overcome them.