 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA New Approach to Complex Dynamic Geofencing for Unmanned Aerial Vehicles
Paper and Code
Oct 18, 2021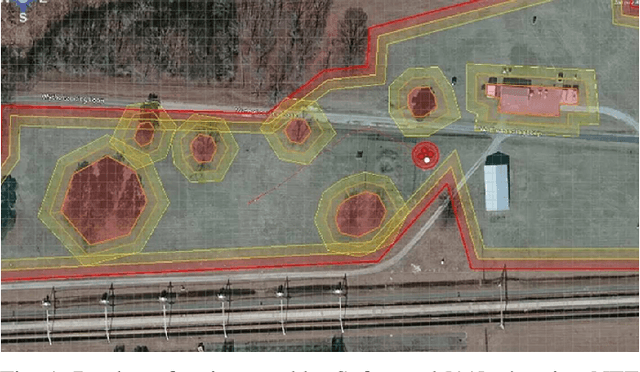
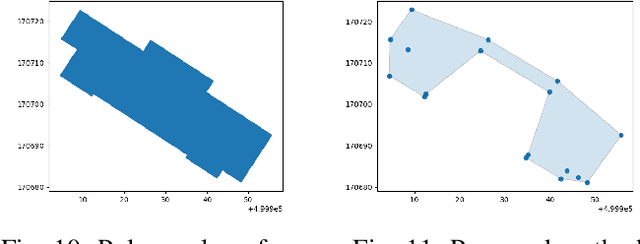
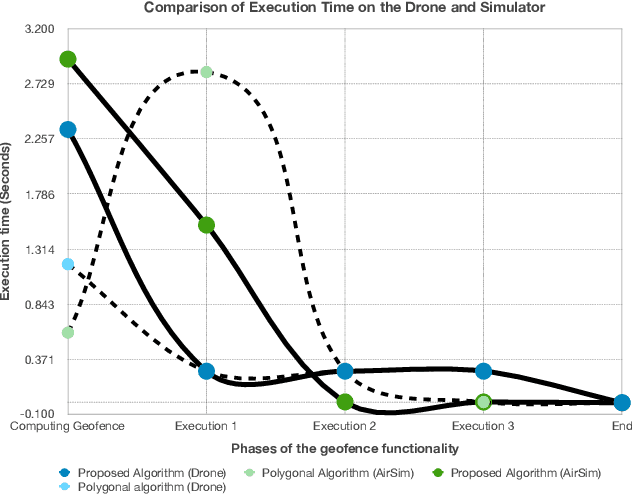
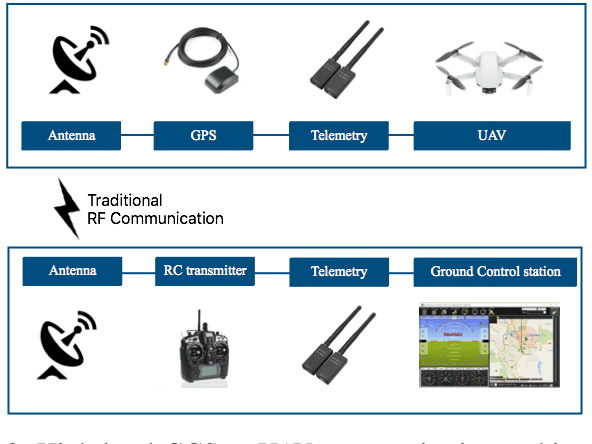
The anticipated widespread use of unmanned aerial vehicles (UAVs) raises significant safety and security concerns, including trespassing in restricted areas, colliding with other UAVs, and disrupting high-traffic airspaces. To mitigate these risks, geofences have been proposed as one line of defence, which limit UAVs from flying into the perimeters of other UAVs and restricted locations. In this paper, we address the concern that existing geometric geofencing algorithms lack accuracy during the calculation of complex geofences, particularly in dynamic urban environments. We propose a new algorithm based on alpha shapes and Voronoi diagrams, which we integrate into an on-drone framework using an open-source mapping database from OpenStreetMap. To demonstrate its efficacy, we present performance results using Microsoft's AirSim and a low-cost commercial UAV platform in a real-world urban environment.