 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA New Approach to Complex Dynamic Geofencing for Unmanned Aerial Vehicles
Oct 18, 2021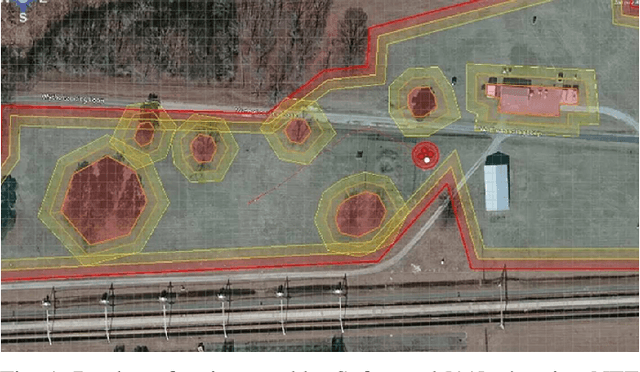
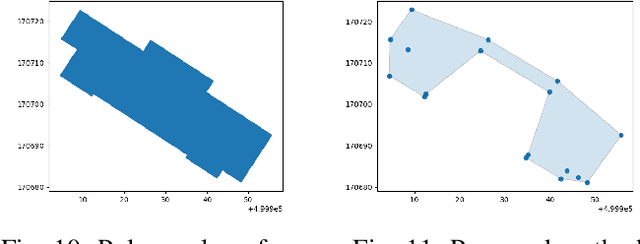
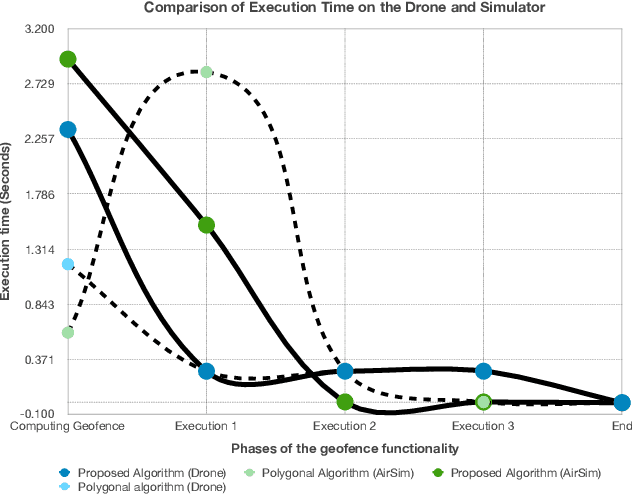
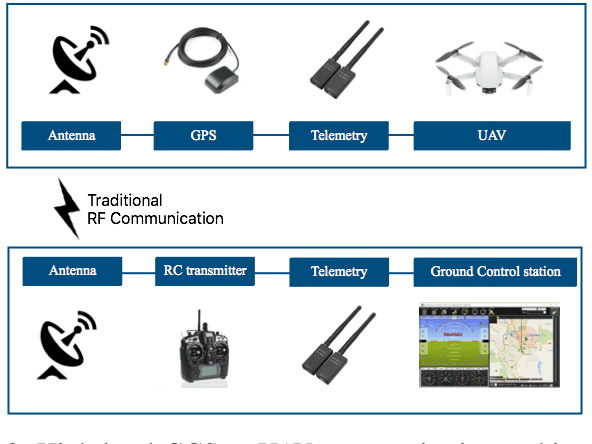
The anticipated widespread use of unmanned aerial vehicles (UAVs) raises significant safety and security concerns, including trespassing in restricted areas, colliding with other UAVs, and disrupting high-traffic airspaces. To mitigate these risks, geofences have been proposed as one line of defence, which limit UAVs from flying into the perimeters of other UAVs and restricted locations. In this paper, we address the concern that existing geometric geofencing algorithms lack accuracy during the calculation of complex geofences, particularly in dynamic urban environments. We propose a new algorithm based on alpha shapes and Voronoi diagrams, which we integrate into an on-drone framework using an open-source mapping database from OpenStreetMap. To demonstrate its efficacy, we present performance results using Microsoft's AirSim and a low-cost commercial UAV platform in a real-world urban environment.
Providing Confidential Cloud-based Fall Detection from Remote Sensor Data Using Multi-Party Computation
Apr 22, 2019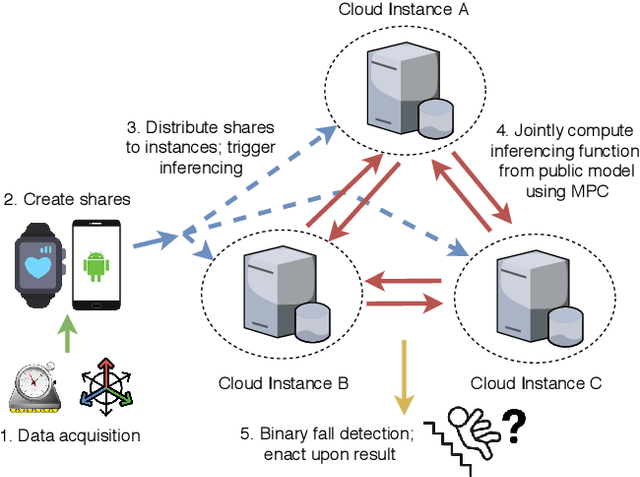
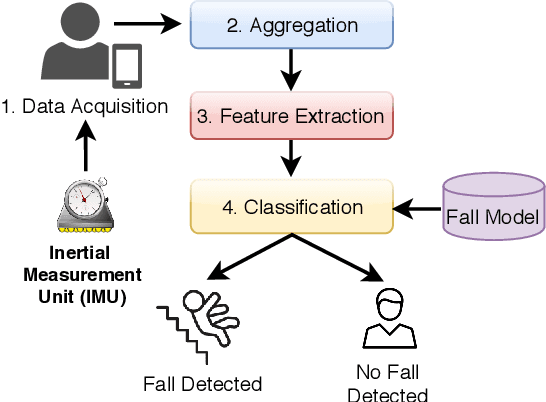
Fall detection systems are concerned with rapidly detecting the occurrence of falls from elderly and disabled users using data from a body-worn inertial measurement unit (IMU), which is typically used in conjunction with machine learning-based classification. Such systems, however, necessitate the collection of high-resolution measurements that can violate users' privacy, such as revealing their gait, activities of daily living (ADLs), and relative position using dead reckoning. In this paper, for the first time, we present the design, implementation and evaluation of applying multi-party computation (MPC) to IMU-based fall detection for assuring the confidentiality of device measurements. The system is evaluated in a cloud-based setting that precludes parties from learning the underlying data using three parties deployed in geographically disparate locations in three cloud configurations. Using a publicly-available dataset comprising fall data from real-world users, we explore the applicability of derivative-based features to mitigate the complexity of MPC-based operations in a state-of-the-art fall detection system. We demonstrate that MPC-based fall detection from IMU measurements is both feasible and practical, executing in 365.2 milliseconds, which falls well below the required time window for on-device data acquisition (750ms).