Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensors, SLAM and Long-term Autonomy: A Review
Jul 04, 2018
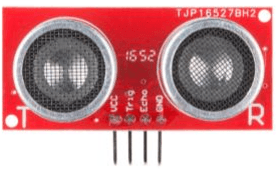
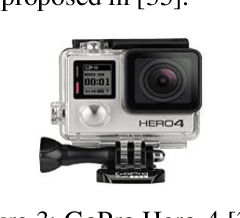
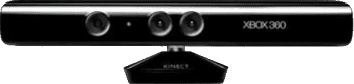
Simultaneous Localization and Mapping, commonly known as SLAM, has been an active research area in the field of Robotics over the past three decades. For solving the SLAM problem, every robot is equipped with either a single sensor or a combination of similar/different sensors. This paper attempts to review, discuss, evaluate and compare these sensors. Keeping an eye on future, this paper also assesses the characteristics of these sensors against factors critical to the long-term autonomy challenge.
* 6 pages, 7 figures
Via