 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModelling urban networks using Variational Autoencoders
May 14, 2019
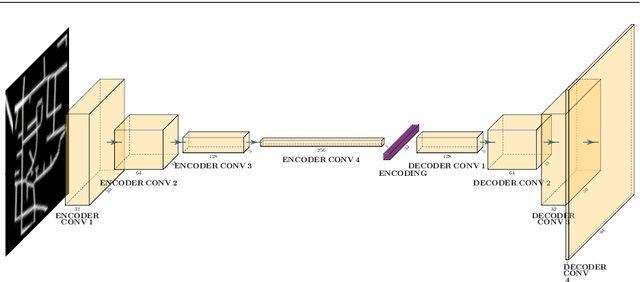
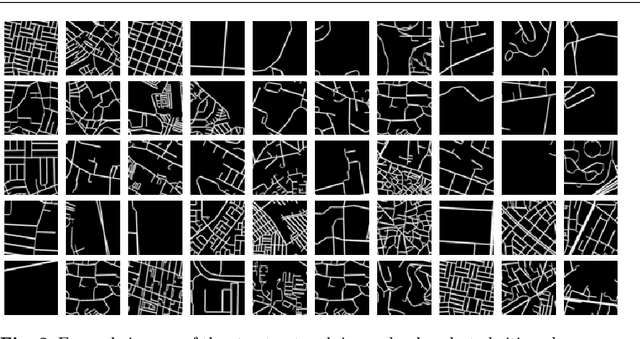
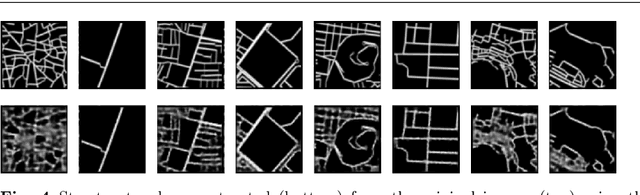
A long-standing question for urban and regional planners pertains to the ability to describe urban patterns quantitatively. Cities' transport infrastructure, particularly street networks, provides an invaluable source of information about the urban patterns generated by peoples' movements and their interactions. With the increasing availability of street network datasets and the advancements in deep learning methods, we are presented with an unprecedented opportunity to push the frontiers of urban modelling towards more data-driven and accurate models of urban forms. In this study, we present our initial work on applying deep generative models to urban street network data to create spatially explicit urban models. We based our work on Variational Autoencoders (VAEs) which are deep generative models that have recently gained their popularity due to the ability to generate realistic images. Initial results show that VAEs are capable of capturing key high-level urban network metrics using low-dimensional vectors and generating new urban forms of complexity matching the cities captured in the street network data.
Probabilistic map-matching using particle filters
Nov 29, 2016



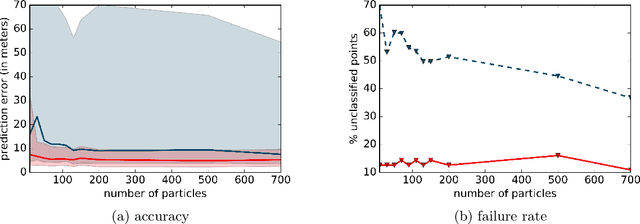
Increasing availability of vehicle GPS data has created potentially transformative opportunities for traffic management, route planning and other location-based services. Critical to the utility of the data is their accuracy. Map-matching is the process of improving the accuracy by aligning GPS data with the road network. In this paper, we propose a purely probabilistic approach to map-matching based on a sequential Monte Carlo algorithm known as particle filters. The approach performs map-matching by producing a range of candidate solutions, each with an associated probability score. We outline implementation details and thoroughly validate the technique on GPS data of varied quality.
Improved Particle Filters for Vehicle Localisation
Nov 15, 2016


The ability to track a moving vehicle is of crucial importance in numerous applications. The task has often been approached by the importance sampling technique of particle filters due to its ability to model non-linear and non-Gaussian dynamics, of which a vehicle travelling on a road network is a good example. Particle filters perform poorly when observations are highly informative. In this paper, we address this problem by proposing particle filters that sample around the most recent observation. The proposal leads to an order of magnitude improvement in accuracy and efficiency over conventional particle filters, especially when observations are infrequent but low-noise.