 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAMaze: An intuitive benchmark generator for fast prototyping of generalizable agents
Nov 20, 2024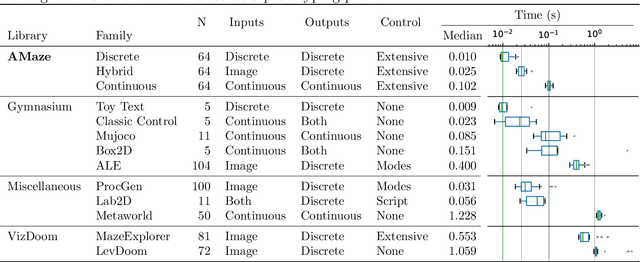
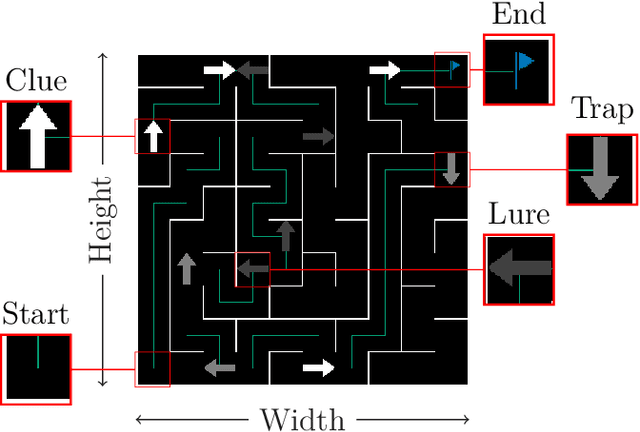
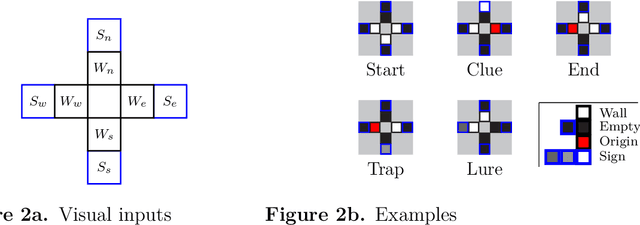
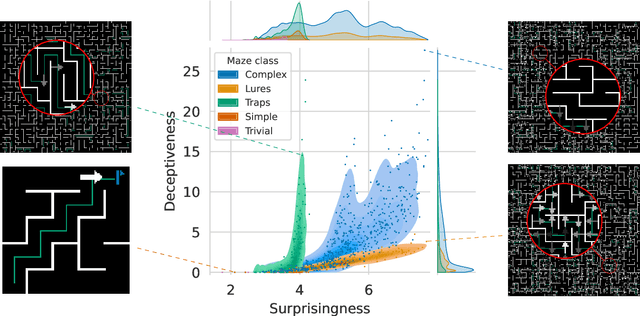
Traditional approaches to training agents have generally involved a single, deterministic environment of minimal complexity to solve various tasks such as robot locomotion or computer vision. However, agents trained in static environments lack generalization capabilities, limiting their potential in broader scenarios. Thus, recent benchmarks frequently rely on multiple environments, for instance, by providing stochastic noise, simple permutations, or altogether different settings. In practice, such collections result mainly from costly human-designed processes or the liberal use of random number generators. In this work, we introduce AMaze, a novel benchmark generator in which embodied agents must navigate a maze by interpreting visual signs of arbitrary complexities and deceptiveness. This generator promotes human interaction through the easy generation of feature-specific mazes and an intuitive understanding of the resulting agents' strategies. As a proof-of-concept, we demonstrate the capabilities of the generator in a simple, fully discrete case with limited deceptiveness. Agents were trained under three different regimes (one-shot, scaffolding, interactive), and the results showed that the latter two cases outperform direct training in terms of generalization capabilities. Indeed, depending on the combination of generalization metric, training regime, and algorithm, the median gain ranged from 50% to 100% and maximal performance was achieved through interactive training, thereby demonstrating the benefits of a controllable human-in-the-loop benchmark generator.
Interactive embodied evolution for socially adept Artificial General Creatures
Jul 31, 2024

We introduce here the concept of Artificial General Creatures (AGC) which encompasses "robotic or virtual agents with a wide enough range of capabilities to ensure their continued survival". With this in mind, we propose a research line aimed at incrementally building both the technology and the trustworthiness of AGC. The core element in this approach is that trust can only be built over time, through demonstrably mutually beneficial interactions. To this end, we advocate starting from unobtrusive, nonthreatening artificial agents that would explicitly collaborate with humans, similarly to what domestic animals do. By combining multiple research fields, from Evolutionary Robotics to Neuroscience, from Ethics to Human-Machine Interaction, we aim at creating embodied, self-sustaining Artificial General Creatures that would form social and emotional connections with humans. Although they would not be able to play competitive online games or generate poems, we argue that creatures akin to artificial pets would be invaluable stepping stones toward symbiotic Artificial General Intelligence.