 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSLUGBOT, an Aplysia-inspired Robotic Grasper for Studying Control
Nov 21, 2022Living systems can use a single periphery to perform a variety of tasks and adapt to a dynamic environment. This multifunctionality is achieved through the use of neural circuitry that adaptively controls the reconfigurable musculature. Current robotic systems struggle to flexibly adapt to unstructured environments. Through mimicry of the neuromechanical coupling seen in living organisms, robotic systems could potentially achieve greater autonomy. The tractable neuromechanics of the sea slug $\textit{Aplysia californica's}$ feeding apparatus, or buccal mass, make it an ideal candidate for applying neuromechanical principles to the control of a soft robot. In this work, a robotic grasper was designed to mimic specific morphology of the $\textit{Aplysia}$ feeding apparatus. These include the use of soft actuators akin to biological muscle, a deformable grasping surface, and a similar muscular architecture. A previously developed Boolean neural controller was then adapted for the control of this soft robotic system. The robot was capable of qualitatively replicating swallowing behavior by cyclically ingesting a plastic tube. The robot's normalized translational and rotational kinematics of the odontophore followed profiles observed $\textit{in vivo}$ despite morphological differences. This brings $\textit{Aplysia}$-inspired control $\textit{in roboto}$ one step closer to multifunctional neural control schema $\textit{in vivo}$ and $\textit{in silico}$. Future additions may improve SLUGBOT's viability as a neuromechanical research platform.
Design of a Biomimetic Tactile Sensor for Material Classification
Mar 29, 2022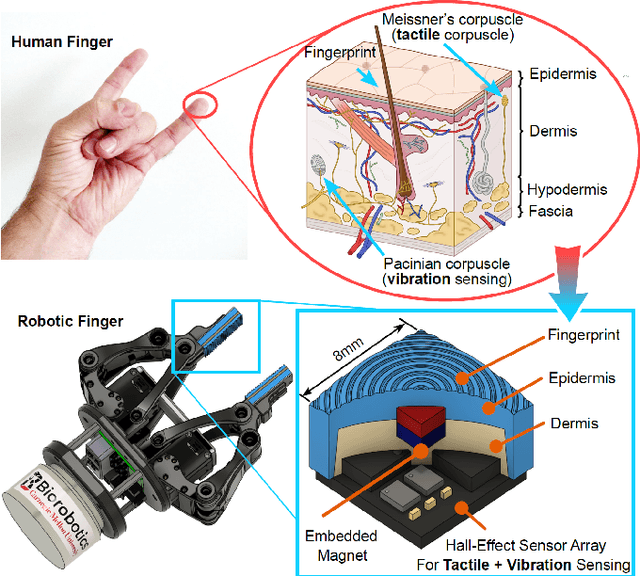
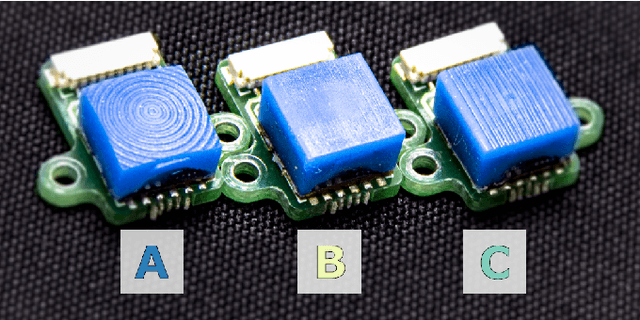
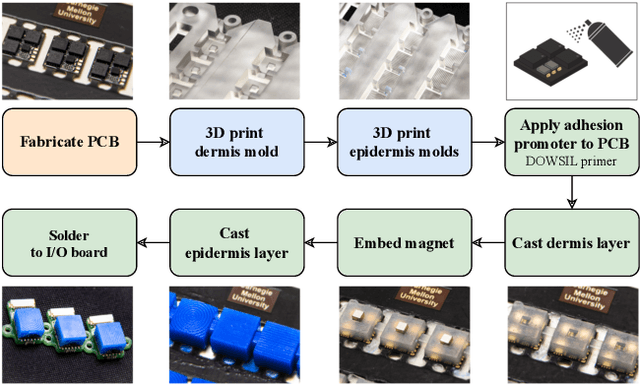
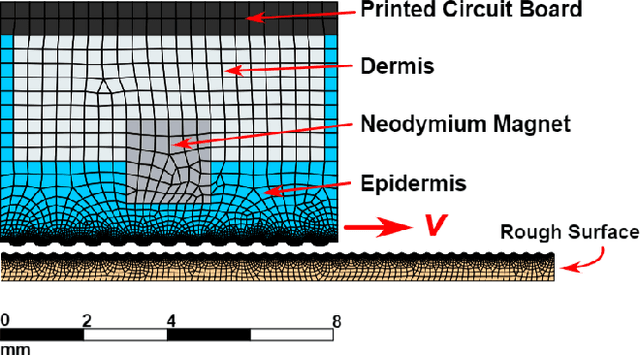
Tactile sensing typically involves active exploration of unknown surfaces and objects, making it especially effective at processing the characteristics of materials and textures. A key property extracted by human tactile perception is surface roughness, which relies on measuring vibratory signals using the multi-layered fingertip structure. Existing robotic systems lack tactile sensors that are able to provide high dynamic sensing ranges, perceive material properties, and maintain a low hardware cost. In this work, we introduce the reference design and fabrication procedure of a miniature and low-cost tactile sensor consisting of a biomimetic cutaneous structure, including the artificial fingerprint, dermis, epidermis, and an embedded magnet-sensor structure which serves as a mechanoreceptor for converting mechanical information to digital signals. The presented sensor is capable of detecting high-resolution magnetic field data through the Hall effect and creating high-dimensional time-frequency domain features for material texture classification. Additionally, we investigate the effects of different superficial sensor fingerprint patterns for classifying materials through both simulation and physical experimentation. After extracting time series and frequency domain features, we assess a k-nearest neighbors classifier for distinguishing between different materials. The results from our experiments show that our biomimetic tactile sensors with fingerprint ridges can classify materials with more than 8% higher accuracy and lower variability than ridge-less sensors. These results, along with the low cost and customizability of our sensor, demonstrate high potential for lowering the barrier to entry for a wide array of robotic applications, including model-less tactile sensing for texture classification, material inspection, and object recognition.