 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Bioinspired Synthetic Nervous System Controller for Pick-and-Place Manipulation
May 18, 2023

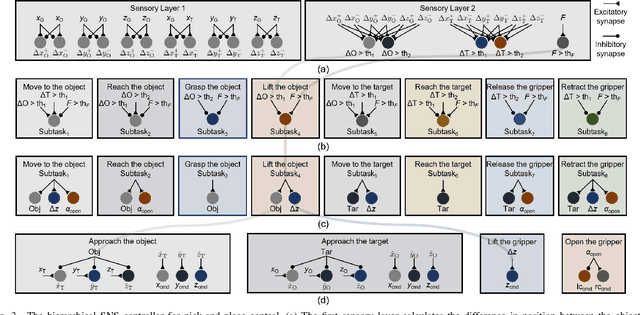

The Synthetic Nervous System (SNS) is a biologically inspired neural network (NN). Due to its capability of capturing complex mechanisms underlying neural computation, an SNS model is a candidate for building compact and interpretable NN controllers for robots. Previous work on SNSs has focused on applying the model to the control of legged robots and the design of functional subnetworks (FSNs) to realize dynamical systems. However, the FSN approach has previously relied on the analytical solution of the governing equations, which is difficult for designing more complex NN controllers. Incorporating plasticity into SNSs and using learning algorithms to tune the parameters offers a promising solution for systematic design in this situation. In this paper, we theoretically analyze the computational advantages of SNSs compared with other classical artificial neural networks. We then use learning algorithms to develop compact subnetworks for implementing addition, subtraction, division, and multiplication. We also combine the learning-based methodology with a bioinspired architecture to design an interpretable SNS for the pick-and-place control of a simulated gantry system. Finally, we show that the SNS controller is successfully transferred to a real-world robotic platform without further tuning of the parameters, verifying the effectiveness of our approach.
SLUGBOT, an Aplysia-inspired Robotic Grasper for Studying Control
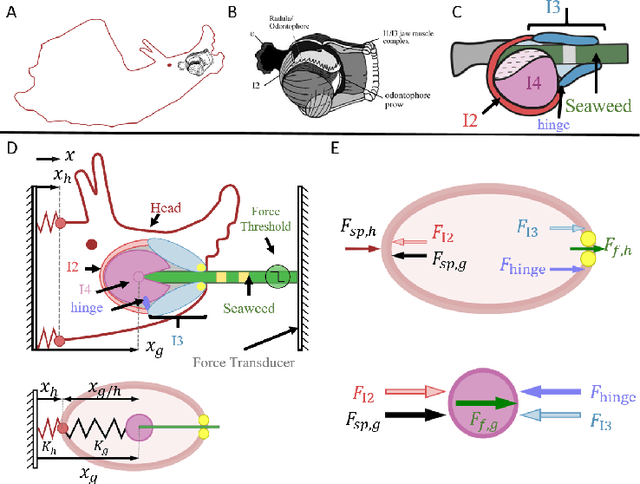
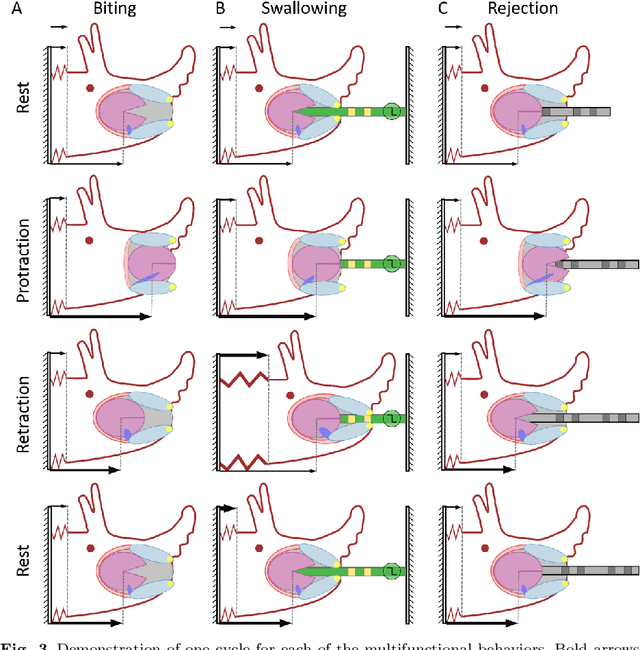
Nov 21, 2022Living systems can use a single periphery to perform a variety of tasks and adapt to a dynamic environment. This multifunctionality is achieved through the use of neural circuitry that adaptively controls the reconfigurable musculature. Current robotic systems struggle to flexibly adapt to unstructured environments. Through mimicry of the neuromechanical coupling seen in living organisms, robotic systems could potentially achieve greater autonomy. The tractable neuromechanics of the sea slug $\textit{Aplysia californica's}$ feeding apparatus, or buccal mass, make it an ideal candidate for applying neuromechanical principles to the control of a soft robot. In this work, a robotic grasper was designed to mimic specific morphology of the $\textit{Aplysia}$ feeding apparatus. These include the use of soft actuators akin to biological muscle, a deformable grasping surface, and a similar muscular architecture. A previously developed Boolean neural controller was then adapted for the control of this soft robotic system. The robot was capable of qualitatively replicating swallowing behavior by cyclically ingesting a plastic tube. The robot's normalized translational and rotational kinematics of the odontophore followed profiles observed $\textit{in vivo}$ despite morphological differences. This brings $\textit{Aplysia}$-inspired control $\textit{in roboto}$ one step closer to multifunctional neural control schema $\textit{in vivo}$ and $\textit{in silico}$. Future additions may improve SLUGBOT's viability as a neuromechanical research platform.
Control for Multifunctionality: Bioinspired Control Based on Feeding in Aplysia californica
Aug 11, 2020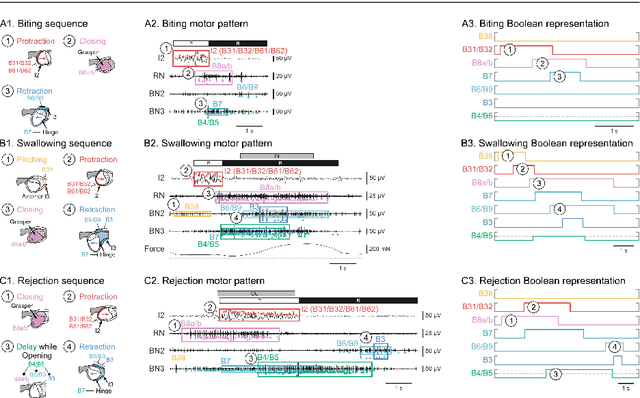

Animals exhibit remarkable feats of behavioral flexibility and multifunctional control that remain challenging for robotic systems. The neural and morphological basis of multifunctionality in animals can provide a source of bio-inspiration for robotic controllers. However, many existing approaches to modeling biological neural networks rely on computationally expensive models and tend to focus solely on the nervous system, often neglecting the biomechanics of the periphery. As a consequence, while these models are excellent tools for neuroscience, they fail to predict functional behavior in real time, which is a critical capability for robotic control. To meet the need for real-time multifunctional control, we have developed a hybrid Boolean model framework capable of modeling neural bursting activity and simple biomechanics at speeds faster than real time. Using this approach, we present a multifunctional model of Aplysia californica feeding that qualitatively reproduces three key feeding behaviors (biting, swallowing, and rejection), demonstrates behavioral switching in response to external sensory cues, and incorporates both known neural connectivity and a simple bioinspired mechanical model of the feeding apparatus. We demonstrate that the model can be used for formulating testable hypotheses and discuss the implications of this approach for robotic control and neuroscience.