Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust online joint state/input/parameter estimation of linear systems
Apr 12, 2022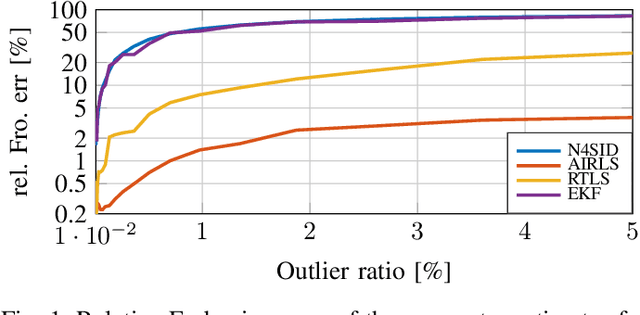
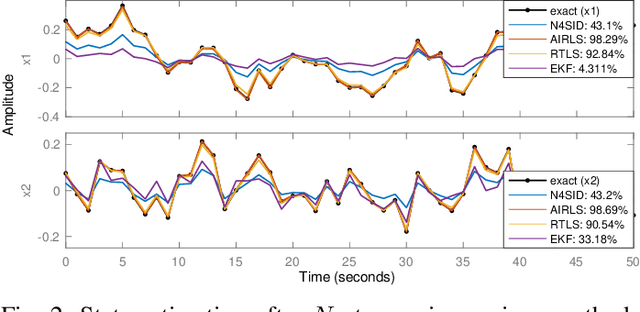
This paper presents a method for jointly estimating the state, input, and parameters of linear systems in an online fashion. The method is specially designed for measurements that are corrupted with non-Gaussian noise or outliers, which are commonly found in engineering applications. In particular, it combines recursive, alternating, and iteratively-reweighted least squares into a single, one-step algorithm, which solves the estimation problem online and benefits from the robustness of least-deviation regression methods. The convergence of the iterative method is formally guaranteed. Numerical experiments show the good performance of the estimation algorithm in presence of outliers and in comparison to state-of-the-art methods.
* 6 pages, 2 figures
Via