 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHaptic Perception via the Dynamics of Flexible Body Inspired by an Ostrich's Neck
Apr 12, 2025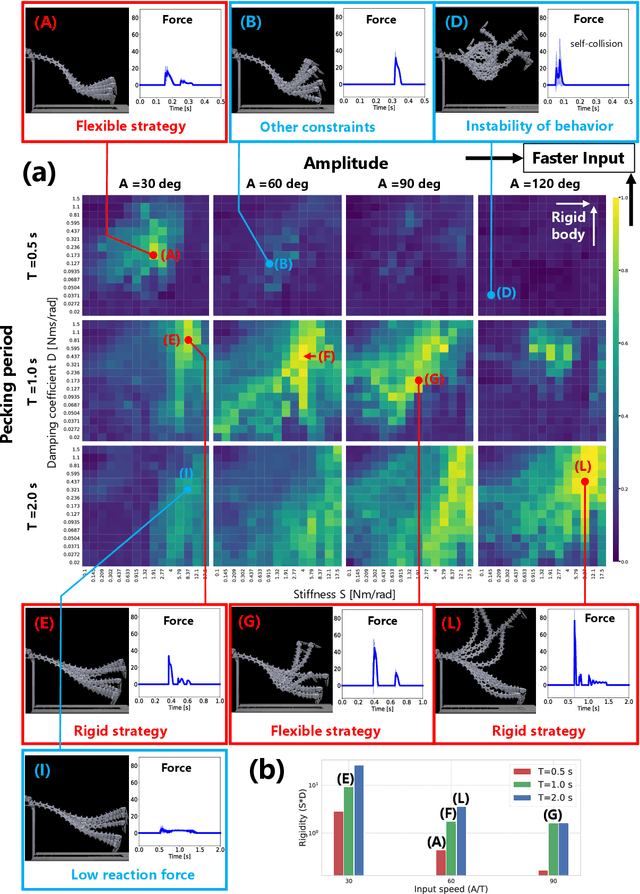

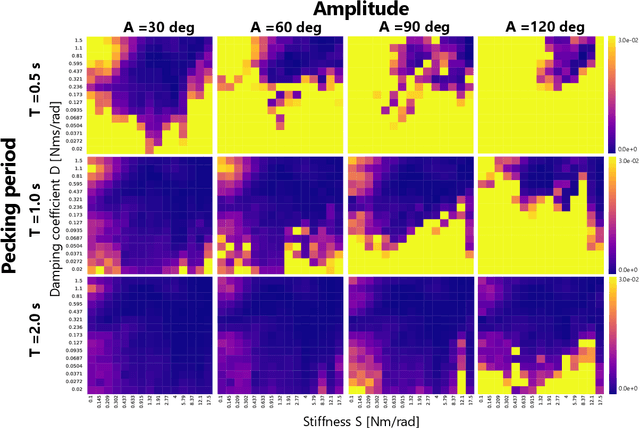
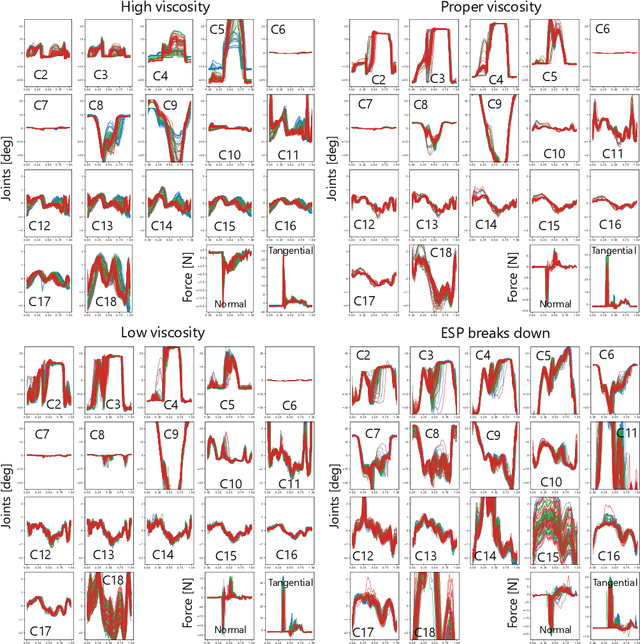
In biological systems, haptic perception is achieved through both flexible skin and flexible body. In fully soft robots, the fragility of their bodies and the time delays in sensory processing pose significant challenges. The musculoskeletal system possesses both the deformability inherent in soft materials and the durability of rigid-body robots. Additionally, by outsourcing part of the intelligent information processing to the morphology of the musculoskeletal system, applications for dynamic tasks are expected. This study focuses on the pecking movements of birds, which achieve precise haptic perception through the musculoskeletal system of their flexible neck. Physical reservoir computing is applied to flexible structures inspired by an ostrich neck to analyze the relationship between haptic perception and physical characteristics. Combined experiments using both an actual robot and simulations demonstrate that, under appropriate body viscoelasticity, the flexible structure can distinguish objects of varying softness and memorize this information as behaviors. Drawing on these findings and anatomical insights from the ostrich neck, a haptic sensing system is proposed that possesses separability and this behavioral memory in flexible structures, enabling rapid learning and real-time inference. The results demonstrate that through the dynamics of flexible structures, diverse functions can emerge beyond their original design as manipulators.