 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMutualForce: Mutual-Aware Enhancement for 4D Radar-LiDAR 3D Object Detection
Jan 17, 2025Radar and LiDAR have been widely used in autonomous driving as LiDAR provides rich structure information, and radar demonstrates high robustness under adverse weather. Recent studies highlight the effectiveness of fusing radar and LiDAR point clouds. However, challenges remain due to the modality misalignment and information loss during feature extractions. To address these issues, we propose a 4D radar-LiDAR framework to mutually enhance their representations. Initially, the indicative features from radar are utilized to guide both radar and LiDAR geometric feature learning. Subsequently, to mitigate their sparsity gap, the shape information from LiDAR is used to enrich radar BEV features. Extensive experiments on the View-of-Delft (VoD) dataset demonstrate our approach's superiority over existing methods, achieving the highest mAP of 71.76% across the entire area and 86.36\% within the driving corridor. Especially for cars, we improve the AP by 4.17% and 4.20% due to the strong indicative features and symmetric shapes.
MUFASA: Multi-View Fusion and Adaptation Network with Spatial Awareness for Radar Object Detection
Aug 01, 2024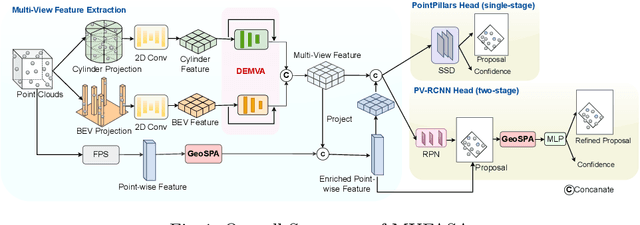
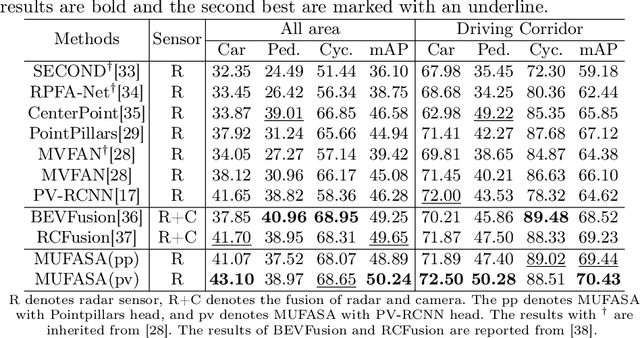
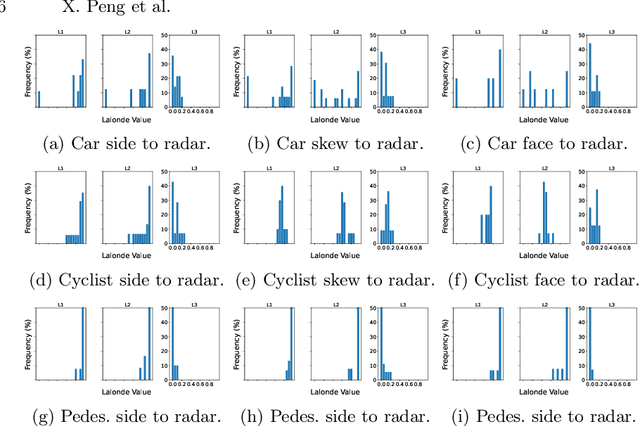

In recent years, approaches based on radar object detection have made significant progress in autonomous driving systems due to their robustness under adverse weather compared to LiDAR. However, the sparsity of radar point clouds poses challenges in achieving precise object detection, highlighting the importance of effective and comprehensive feature extraction technologies. To address this challenge, this paper introduces a comprehensive feature extraction method for radar point clouds. This study first enhances the capability of detection networks by using a plug-and-play module, GeoSPA. It leverages the Lalonde features to explore local geometric patterns. Additionally, a distributed multi-view attention mechanism, DEMVA, is designed to integrate the shared information across the entire dataset with the global information of each individual frame. By employing the two modules, we present our method, MUFASA, which enhances object detection performance through improved feature extraction. The approach is evaluated on the VoD and TJ4DRaDSet datasets to demonstrate its effectiveness. In particular, we achieve state-of-the-art results among radar-based methods on the VoD dataset with the mAP of 50.24%.