 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMacroscopic Emission Modeling of Urban Traffic Using Probe Vehicle Data: A Machine Learning Approach
Nov 11, 2025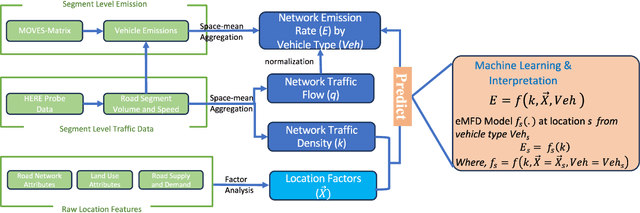
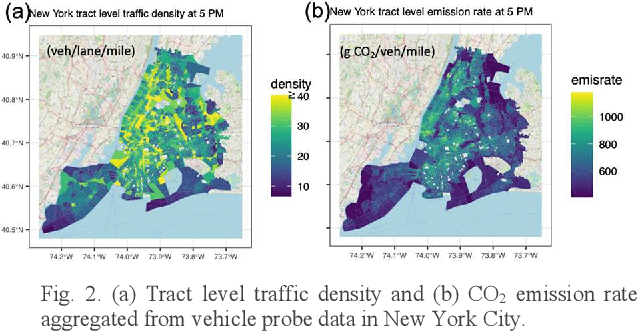
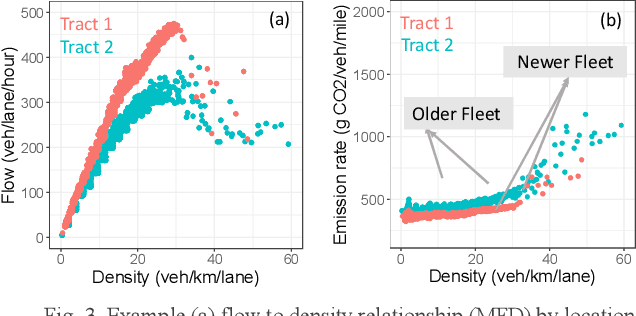
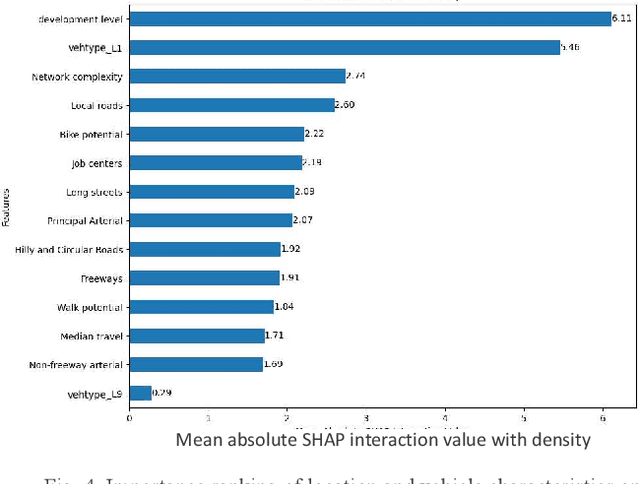
Urban congestions cause inefficient movement of vehicles and exacerbate greenhouse gas emissions and urban air pollution. Macroscopic emission fundamental diagram (eMFD)captures an orderly relationship among emission and aggregated traffic variables at the network level, allowing for real-time monitoring of region-wide emissions and optimal allocation of travel demand to existing networks, reducing urban congestion and associated emissions. However, empirically derived eMFD models are sparse due to historical data limitation. Leveraging a large-scale and granular traffic and emission data derived from probe vehicles, this study is the first to apply machine learning methods to predict the network wide emission rate to traffic relationship in U.S. urban areas at a large scale. The analysis framework and insights developed in this work generate data-driven eMFDs and a deeper understanding of their location dependence on network, infrastructure, land use, and vehicle characteristics, enabling transportation authorities to measure carbon emissions from urban transport of given travel demand and optimize location specific traffic management and planning decisions to mitigate network-wide emissions.
Dynamic Toll Prediction Using Historical Data on Toll Roads: Case Study of the I-66 Inner Beltway
Apr 20, 2021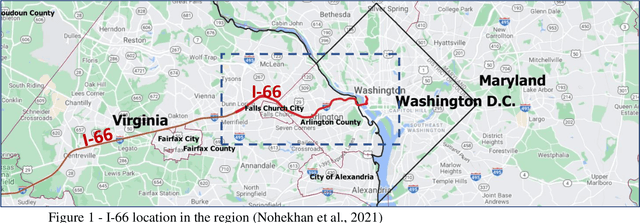
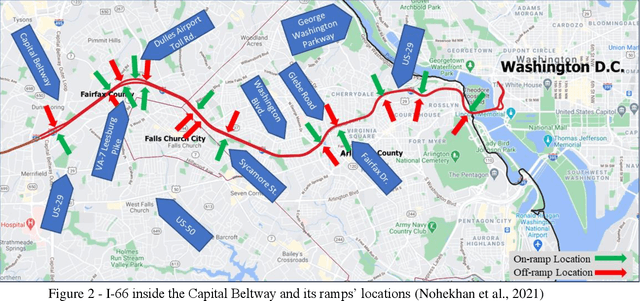
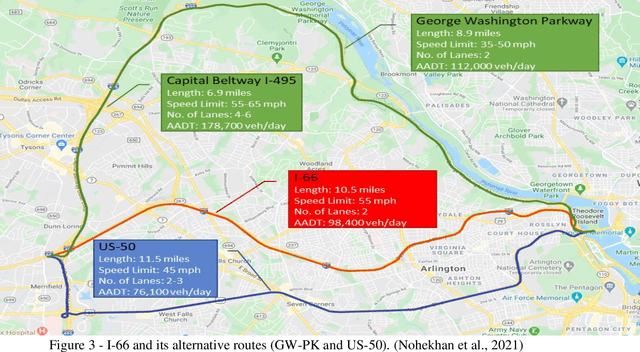
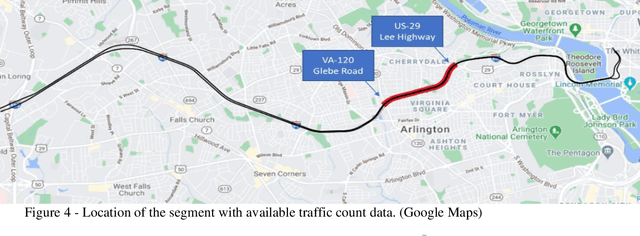
Providing the users of a dynamic tolling system with predictions of tolling prices and the travel time difference between the toll road and the alternative routes enables them to make their travel decisions before starting their trip. This study aims to provide accurate predictions of tolling price through training and testing random forest, multilayer perceptron, and long short-term memory models and compare them with the current situation that the best prediction is extending the current toll to the next timesteps. The prediction time horizon includes five 6-minute time intervals ahead of the present time. The prediction performance of models over the testing set reveals that while all the models were significantly better than the base model, the random forest outperforms all models. For instance, while in the trained models, the mean absolute error range is from $1.5 to $2.5 for the next six minutes to the next 30 minutes, respectively, the same measure in the base model is in the range of $2.5 to $6. The prediction of travel time difference along the toll road and its alternative route with the shortest travel time revealed that the multilayer perceptron performs marginally better than the base model. However, due to a relatively stable travel time difference, the current travel time difference is an acceptable prediction for the next 30 minutes prediction horizon.
Localization of Autonomous Vehicles: Proof of Concept for A Computer Vision Approach
Apr 06, 2021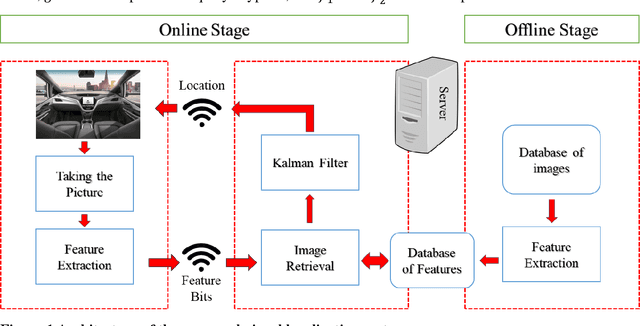
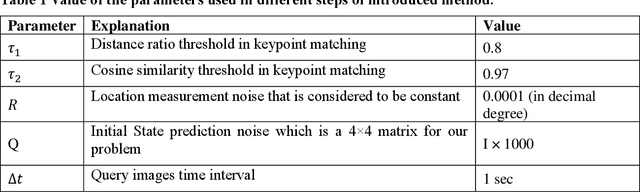
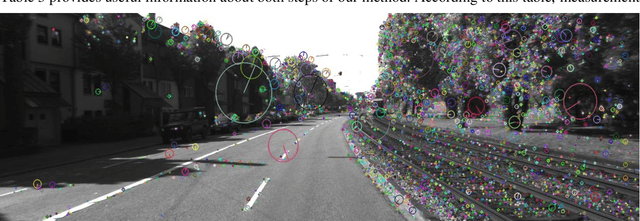
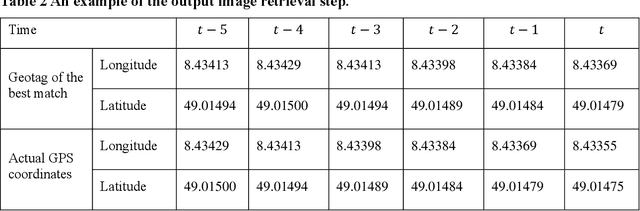
This paper introduces a visual-based localization method for autonomous vehicles (AVs) that operate in the absence of any complicated hardware system but a single camera. Visual localization refers to techniques that aim to find the location of an object based on visual information of its surrounding area. The problem of localization has been of interest for many years. However, visual localization is a relatively new subject in the literature of transportation. Moreover, the inevitable application of this type of localization in the context of autonomous vehicles demands special attention from the transportation community to this problem. This study proposes a two-step localization method that requires a database of geotagged images and a camera mounted on a vehicle that can take pictures while the car is moving. The first step which is image retrieval uses SIFT local feature descriptor to find an initial location for the vehicle using image matching. The next step is to utilize the Kalman filter to estimate a more accurate location for the vehicle as it is moving. All stages of the introduced method are implemented as a complete system using different Python libraries. The proposed system is tested on the KITTI dataset and has shown an average accuracy of 2 meters in finding the final location of the vehicle.
Estimating Historical Hourly Traffic Volumes via Machine Learning and Vehicle Probe Data: A Maryland Case Study
Oct 17, 2018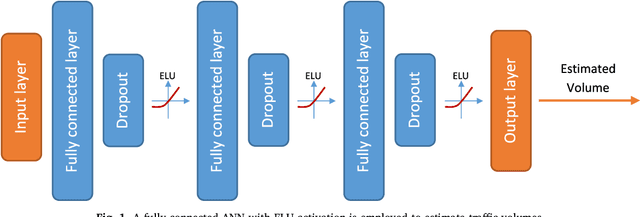

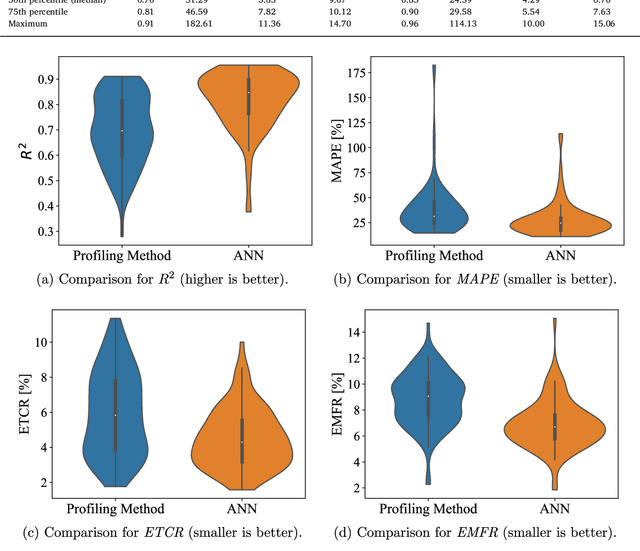
This paper focuses on the problem of estimating historical traffic volumes between sparsely-located traffic sensors, which transportation agencies need to accurately compute statewide performance measures. To this end, the paper examines applications of vehicle probe data, automatic traffic recorder counts, and neural network models to estimate hourly volumes in the Maryland highway network, and proposes a novel approach that combines neural networks with an existing profiling method. On average, the proposed approach yields 24% more accurate estimates than volume profiles, which are currently used by transportation agencies across the US to compute statewide performance measures. The paper also quantifies the value of using vehicle probe data in estimating hourly traffic volumes, which provides important managerial insights to transportation agencies interested in acquiring this type of data. For example, results show that volumes can be estimated with a mean absolute percent error of about 21% at locations where average number of observed probes is between 30 and 47 vehicles/hr, which provides a useful guideline for assessing the value of probe vehicle data from different vendors.