 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Toll Prediction Using Historical Data on Toll Roads: Case Study of the I-66 Inner Beltway
Apr 20, 2021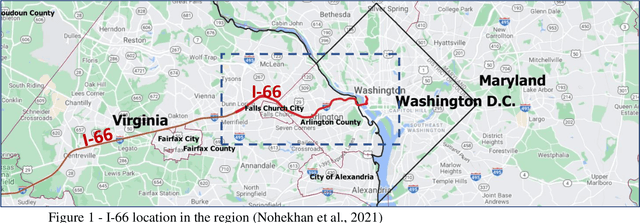
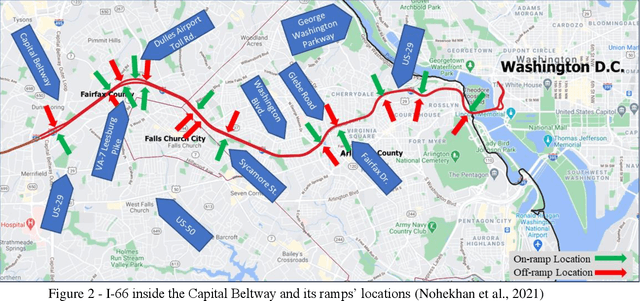
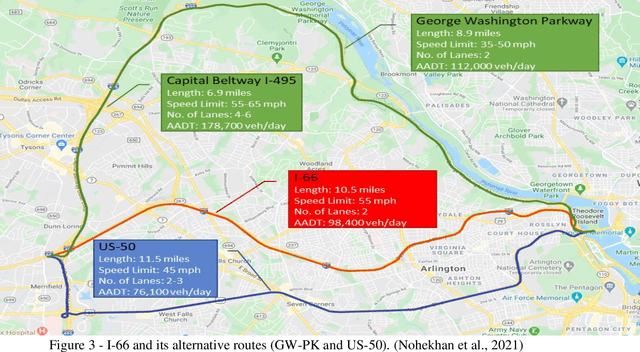
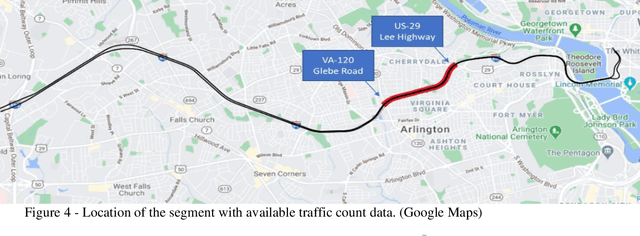
Providing the users of a dynamic tolling system with predictions of tolling prices and the travel time difference between the toll road and the alternative routes enables them to make their travel decisions before starting their trip. This study aims to provide accurate predictions of tolling price through training and testing random forest, multilayer perceptron, and long short-term memory models and compare them with the current situation that the best prediction is extending the current toll to the next timesteps. The prediction time horizon includes five 6-minute time intervals ahead of the present time. The prediction performance of models over the testing set reveals that while all the models were significantly better than the base model, the random forest outperforms all models. For instance, while in the trained models, the mean absolute error range is from $1.5 to $2.5 for the next six minutes to the next 30 minutes, respectively, the same measure in the base model is in the range of $2.5 to $6. The prediction of travel time difference along the toll road and its alternative route with the shortest travel time revealed that the multilayer perceptron performs marginally better than the base model. However, due to a relatively stable travel time difference, the current travel time difference is an acceptable prediction for the next 30 minutes prediction horizon.
Localization of Autonomous Vehicles: Proof of Concept for A Computer Vision Approach
Apr 06, 2021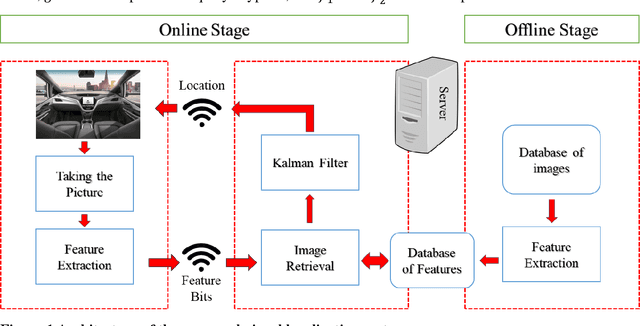
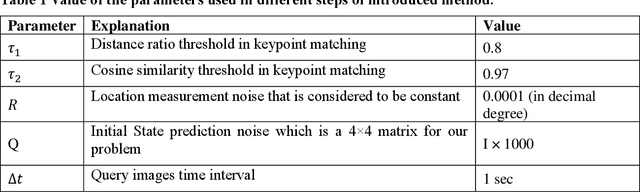
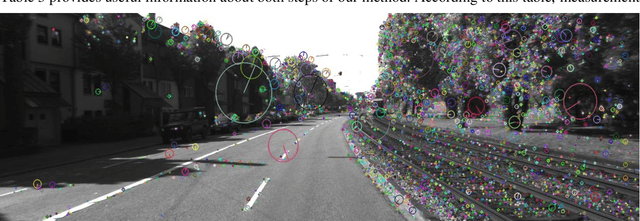
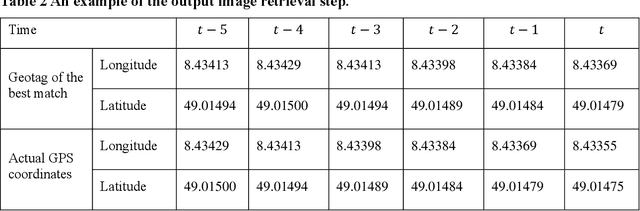
This paper introduces a visual-based localization method for autonomous vehicles (AVs) that operate in the absence of any complicated hardware system but a single camera. Visual localization refers to techniques that aim to find the location of an object based on visual information of its surrounding area. The problem of localization has been of interest for many years. However, visual localization is a relatively new subject in the literature of transportation. Moreover, the inevitable application of this type of localization in the context of autonomous vehicles demands special attention from the transportation community to this problem. This study proposes a two-step localization method that requires a database of geotagged images and a camera mounted on a vehicle that can take pictures while the car is moving. The first step which is image retrieval uses SIFT local feature descriptor to find an initial location for the vehicle using image matching. The next step is to utilize the Kalman filter to estimate a more accurate location for the vehicle as it is moving. All stages of the introduced method are implemented as a complete system using different Python libraries. The proposed system is tested on the KITTI dataset and has shown an average accuracy of 2 meters in finding the final location of the vehicle.