 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluation of Robust Point Set Registration Applied to Automotive Doppler Radar
Apr 20, 2022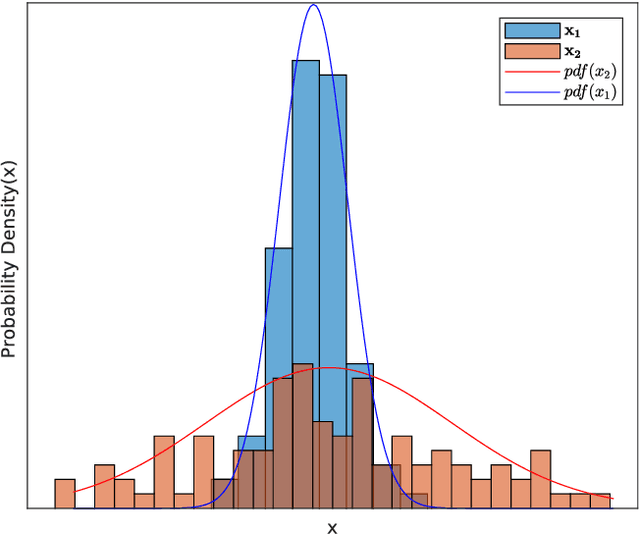


Point set registration is the process of finding the best alignment between two point sets, and it is a common task in different domains, especially in the automotive and mobile robotics domains. Lots of approaches are proposed in the literature, where the iterative closest point ICP is a well-known approach in this vein, which builds an explicit correspondence between both point sets to achieve the registration task. However, this work is interested in achieving the registration without building any explicit correspondence between both point sets, following a probabilistic framework. The most critical task in point set registration is how to elaborate the cost function, which measures the distance between both point sets. The probabilistic framework includes two possible ways to build the cost function: The summing and the likelihood. The main focus of this work is to analyze and compare the behavior of both approaches. Therefore, a 1D synthetic scenario is used to build the cost function step by step, besides the estimation error. Finally, this work uses two data sets for evaluation: A 2D synthetic data set and a real data set. The evaluation process compares and analyzes the estimation error and estimated uncertainty. Thus, two different methods are used in the evaluation process: The normalized estimation error squared NEES and noncredibility index NCI. A 77 GHz automotive Doppler radar provides the real data set, and in the real evaluation, we evaluate the ego-motion estimation of a robot as an application for the registration.
A Credible and Robust approach to Ego-Motion Estimation using an Automotive Radar
Apr 19, 2022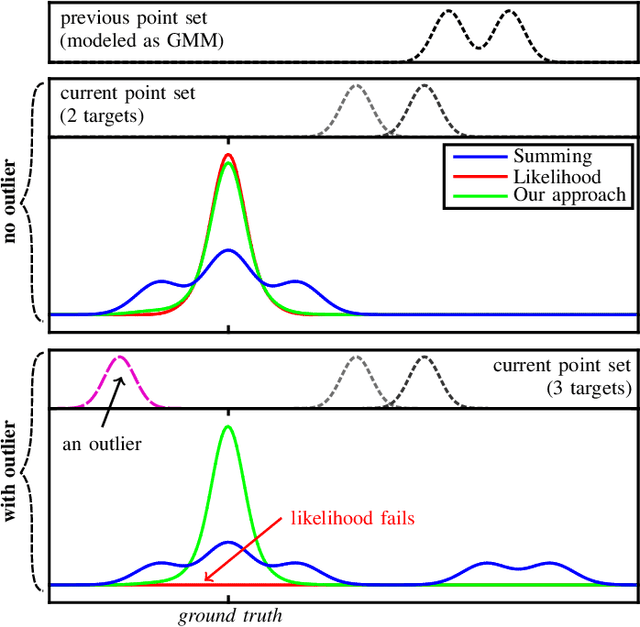
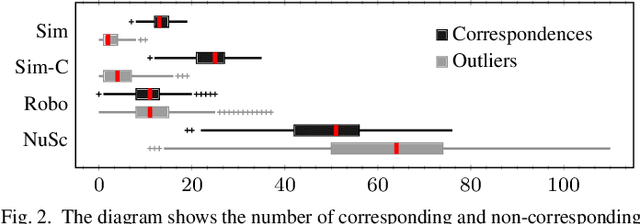
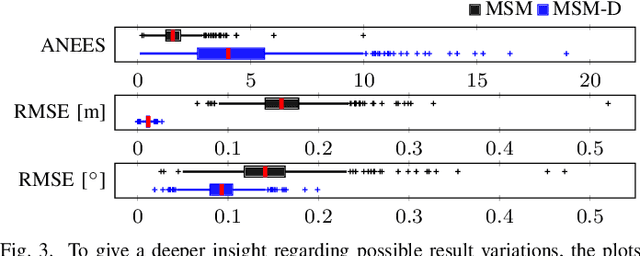
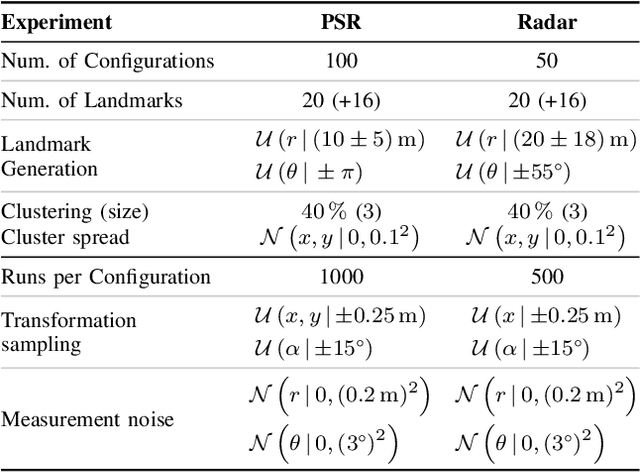
Consistent motion estimation is fundamental for all mobile autonomous systems. While this sounds like an easy task, often, it is not the case because of changing environmental conditions affecting odometry obtained from vision, Lidar, or the wheels themselves. Unsusceptible to challenging lighting and weather conditions, radar sensors are an obvious alternative. Usually, automotive radars return a sparse point cloud, representing the surroundings. Utilizing this information to motion estimation is challenging due to unstable and phantom measurements, which result in a high rate of outliers. We introduce a credible and robust probabilistic approach to estimate the ego-motion based on these challenging radar measurements; intended to be used within a loosely-coupled sensor fusion framework. Compared to existing solutions, evaluated on the popular nuScenes dataset and others, we show that our proposed algorithm is more credible while not depending on explicit correspondence calculation.