 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntent-Driven UAM Rescheduling
Dec 17, 2025



Due to the restricted resources, efficient scheduling in vertiports has received much more attention in the field of Urban Air Mobility (UAM). For the scheduling problem, we utilize a Mixed Integer Linear Programming (MILP), which is often formulated in a resource-restricted project scheduling problem (RCPSP). In this paper, we show our approach to handle both dynamic operation requirements and vague rescheduling requests from humans. Particularly, we utilize a three-valued logic for interpreting ambiguous user intents and a decision tree, proposing a newly integrated system that combines Answer Set Programming (ASP) and MILP. This integrated framework optimizes schedules and supports human inputs transparently. With this system, we provide a robust structure for explainable, adaptive UAM scheduling.
Next-Depth Lookahead Tree
Sep 18, 2025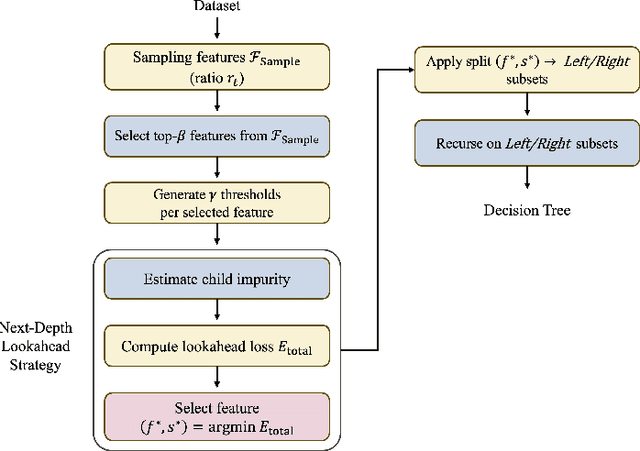
This paper proposes the Next-Depth Lookahead Tree (NDLT), a single-tree model designed to improve performance by evaluating node splits not only at the node being optimized but also by evaluating the quality of the next depth level.
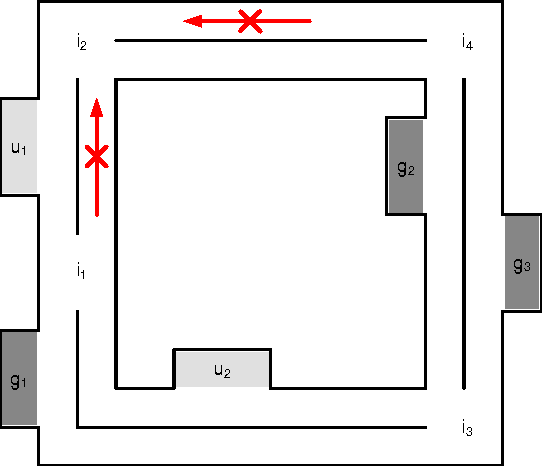
Dialogue Possibilities between a Human Supervisor and UAM Air Traffic Management: Route Alteration
Aug 11, 2023This paper introduces a novel approach to detour management in Urban Air Traffic Management (UATM) using knowledge representation and reasoning. It aims to understand the complexities and requirements of UAM detours, enabling a method that quickly identifies safe and efficient routes in a carefully sampled environment. This method implemented in Answer Set Programming uses non-monotonic reasoning and a two-phase conversation between a human manager and the UATM system, considering factors like safety and potential impacts. The robustness and efficacy of the proposed method were validated through several queries from two simulation scenarios, contributing to the symbiosis of human knowledge and advanced AI techniques. The paper provides an introduction, citing relevant studies, problem formulation, solution, discussions, and concluding comments.
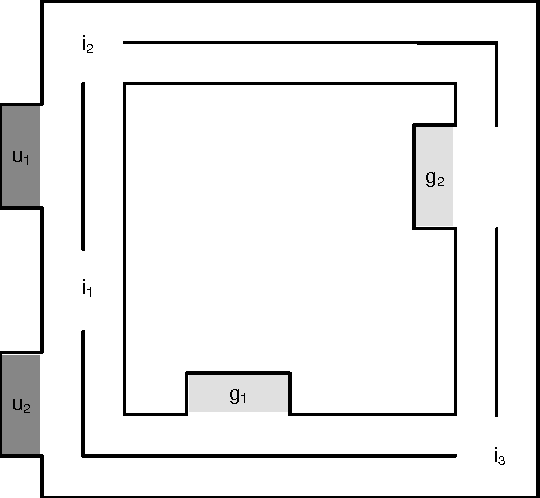
We, Vertiport 6, are temporarily closed: Interactional Ontological Methods for Changing the Destination
Jul 07, 2023This paper presents a continuation of the previous research on the interaction between a human traffic manager and the UATMS. In particular, we focus on the automation of the process of handling a vertiport outage, which was partially covered in the previous work. Once the manager reports that a vertiport is out of service, which means landings for all corresponding agents are prohibited, the air traffic system automates what it has to handle for this event. The entire process is simulated through knowledge representation and reasoning. Moreover, two distinct perspectives are respected for the human supervisor and the management system, and the related ontologies and rules address their interactions. We believe that applying non-monotonic reasoning can verify each step of the process and explain how the system works. After a short introduction with related works, this paper continues with problem formulation, primary solution, discussion, and conclusions.
Agent 3, change your route: possible conversation between a human manager and UAM Air Traffic Management (UATM)
Jun 25, 2023This work in progress paper provides an example to show a detouring procedure through knowledge representation and reasoning. When a human manager requests a detouring, this should affect the related agents. Through non-monotonic reasoning process, we verify each step to be proceeded and provide all the successful connections of the reasoning. Following this progress and continuing this idea development, we expect that this simulated scenario can be a guideline to build the traffic management system in real. After a brief introduction including related works, we provide our problem formulation, primary work, discussion, and conclusions.
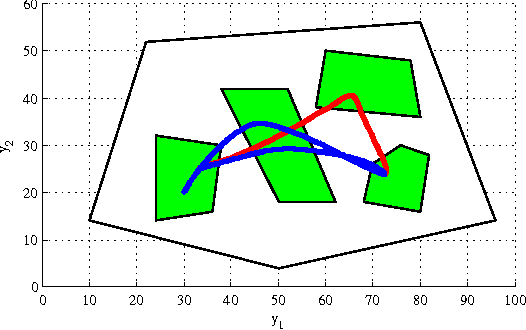
Extended LTLvis Motion Planning interface (Extended Technical Report)
Jul 24, 2016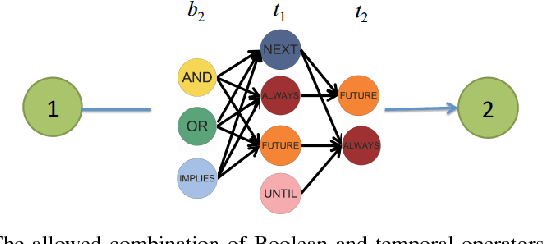
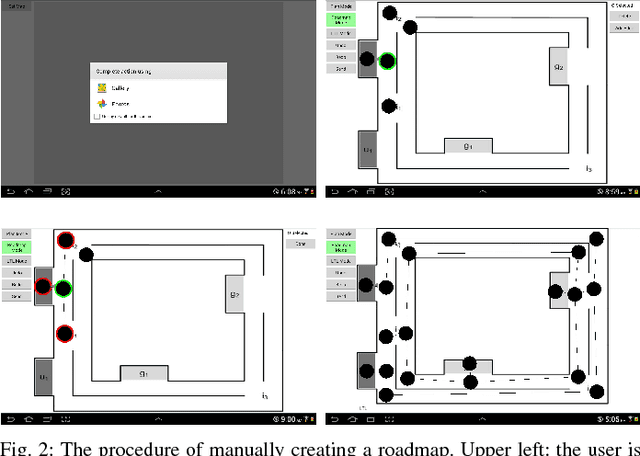
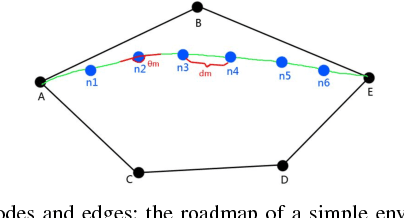
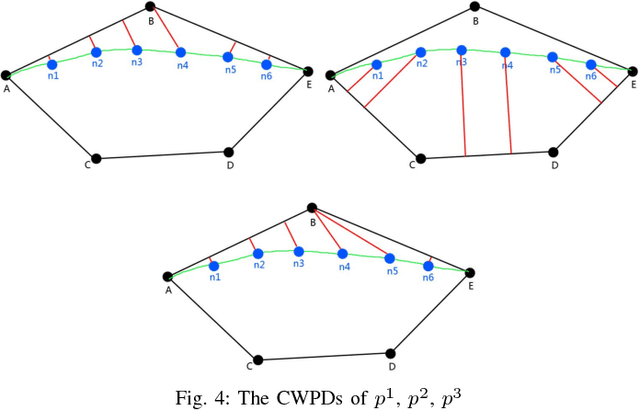
This paper introduces an extended version of the Linear Temporal Logic (LTL) graphical interface. It is a sketch based interface built on the Android platform which makes the LTL control interface more straightforward and friendly to nonexpert users. By predefining a set of areas of interest, this interface can quickly and efficiently create plans that satisfy extended plan goals in LTL. The interface can also allow users to customize the paths for this plan by sketching a set of reference trajectories. Given the custom paths by the user, the LTL specification and the environment, the interface generates a plan balancing the customized paths and the LTL specifications. We also show experimental results with the implemented interface.
DisCoF$^+$: Asynchronous DisCoF with Flexible Decoupling for Cooperative Pathfinding in Distributed Systems
Jun 11, 2015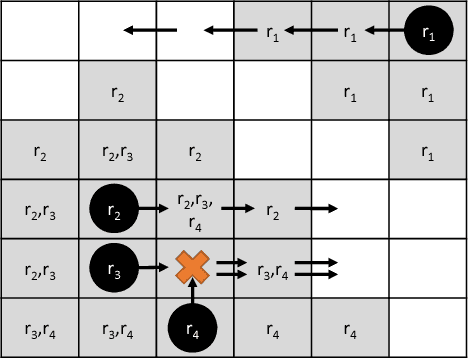

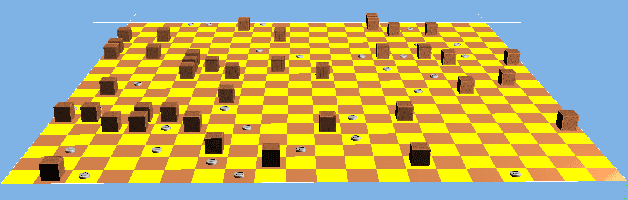

In our prior work, we outlined an approach, named DisCoF, for cooperative pathfinding in distributed systems with limited sensing and communication range. Contrasting to prior works on cooperative pathfinding with completeness guarantees, which often assume the access to global information, DisCoF does not make this assumption. The implication is that at any given time in DisCoF, the robots may not all be aware of each other, which is often the case in distributed systems. As a result, DisCoF represents an inherently online approach since coordination can only be realized in an opportunistic manner between robots that are within each other's sensing and communication range. However, there are a few assumptions made in DisCoF to facilitate a formal analysis, which must be removed to work with distributed multi-robot platforms. In this paper, we present DisCoF$^+$, which extends DisCoF by enabling an asynchronous solution, as well as providing flexible decoupling between robots for performance improvement. We also extend the formal results of DisCoF to DisCoF$^+$. Furthermore, we evaluate our implementation of DisCoF$^+$ and demonstrate a simulation of it running in a distributed multi-robot environment. Finally, we compare DisCoF$^+$ with DisCoF in terms of plan quality and planning performance.
On the Minimal Revision Problem of Specification Automata
Nov 26, 2014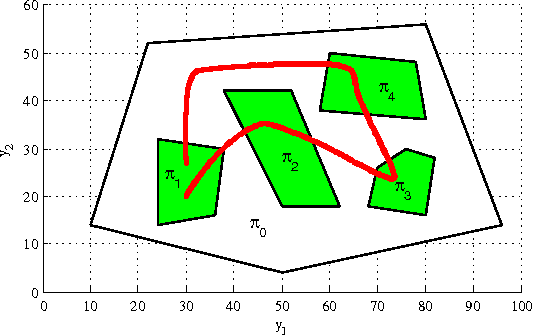
As robots are being integrated into our daily lives, it becomes necessary to provide guarantees on the safe and provably correct operation. Such guarantees can be provided using automata theoretic task and mission planning where the requirements are expressed as temporal logic specifications. However, in real-life scenarios, it is to be expected that not all user task requirements can be realized by the robot. In such cases, the robot must provide feedback to the user on why it cannot accomplish a given task. Moreover, the robot should indicate what tasks it can accomplish which are as "close" as possible to the initial user intent. This paper establishes that the latter problem, which is referred to as the minimal specification revision problem, is NP complete. A heuristic algorithm is presented that can compute good approximations to the Minimal Revision Problem (MRP) in polynomial time. The experimental study of the algorithm demonstrates that in most problem instances the heuristic algorithm actually returns the optimal solution. Finally, some cases where the algorithm does not return the optimal solution are presented.