 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Domain Adaptation using Generative Adversarial Networks for Semantic Segmentation of Aerial Images
May 08, 2019
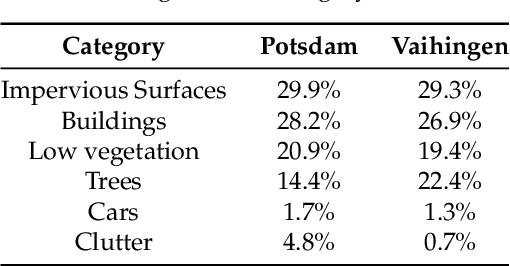


Segmenting aerial images is being of great potential in surveillance and scene understanding of urban areas. It provides a mean for automatic reporting of the different events that happen in inhabited areas. This remarkably promotes public safety and traffic management applications. After the wide adoption of convolutional neural networks methods, the accuracy of semantic segmentation algorithms could easily surpass 80% if a robust dataset is provided. Despite this success, the deployment of a pre-trained segmentation model to survey a new city that is not included in the training set significantly decreases the accuracy. This is due to the domain shift between the source dataset on which the model is trained and the new target domain of the new city images. In this paper, we address this issue and consider the challenge of domain adaptation in semantic segmentation of aerial images. We design an algorithm that reduces the domain shift impact using Generative Adversarial Networks (GANs). In the experiments, we test the proposed methodology on the International Society for Photogrammetry and Remote Sensing (ISPRS) semantic segmentation dataset and found that our method improves the overall accuracy from 35% to 52% when passing from Potsdam domain (considered as source domain) to Vaihingen domain (considered as target domain). In addition, the method allows recovering efficiently the inverted classes due to sensor variation. In particular, it improves the average segmentation accuracy of the inverted classes due to sensor variation from 14% to 61%.
Car Detection using Unmanned Aerial Vehicles: Comparison between Faster R-CNN and YOLOv3
Dec 28, 2018

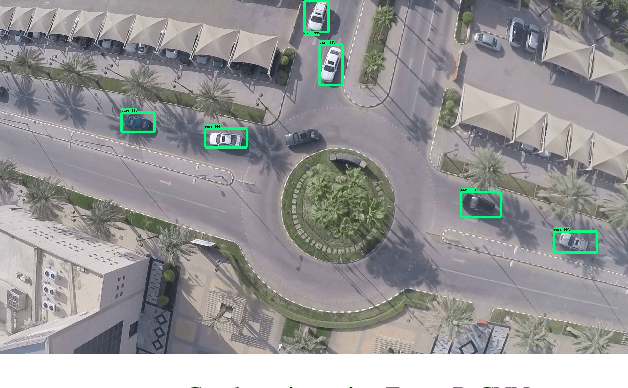

Unmanned Aerial Vehicles are increasingly being used in surveillance and traffic monitoring thanks to their high mobility and ability to cover areas at different altitudes and locations. One of the major challenges is to use aerial images to accurately detect cars and count them in real-time for traffic monitoring purposes. Several deep learning techniques were recently proposed based on convolution neural network (CNN) for real-time classification and recognition in computer vision. However, their performance depends on the scenarios where they are used. In this paper, we investigate the performance of two state-of-the-art CNN algorithms, namely Faster R-CNN and YOLOv3, in the context of car detection from aerial images. We trained and tested these two models on a large car dataset taken from UAVs. We demonstrated in this paper that YOLOv3 outperforms Faster R-CNN in sensitivity and processing time, although they are comparable in the precision metric.
* This paper is accepted in The 1st Unmanned Vehicle Systems conference in Oman, Feb 2019