 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Vision-Language-Action Model with Visual Prompt for OFF-Road Autonomous Driving
Jan 07, 2026Efficient trajectory planning in off-road terrains presents a formidable challenge for autonomous vehicles, often necessitating complex multi-step pipelines. However, traditional approaches exhibit limited adaptability in dynamic environments. To address these limitations, this paper proposes OFF-EMMA, a novel end-to-end multimodal framework designed to overcome the deficiencies of insufficient spatial perception and unstable reasoning in visual-language-action (VLA) models for off-road autonomous driving scenarios. The framework explicitly annotates input images through the design of a visual prompt block and introduces a chain-of-thought with self-consistency (COT-SC) reasoning strategy to enhance the accuracy and robustness of trajectory planning. The visual prompt block utilizes semantic segmentation masks as visual prompts, enhancing the spatial understanding ability of pre-trained visual-language models for complex terrains. The COT- SC strategy effectively mitigates the error impact of outliers on planning performance through a multi-path reasoning mechanism. Experimental results on the RELLIS-3D off-road dataset demonstrate that OFF-EMMA significantly outperforms existing methods, reducing the average L2 error of the Qwen backbone model by 13.3% and decreasing the failure rate from 16.52% to 6.56%.
Klear-AgentForge: Forging Agentic Intelligence through Posttraining Scaling
Nov 08, 2025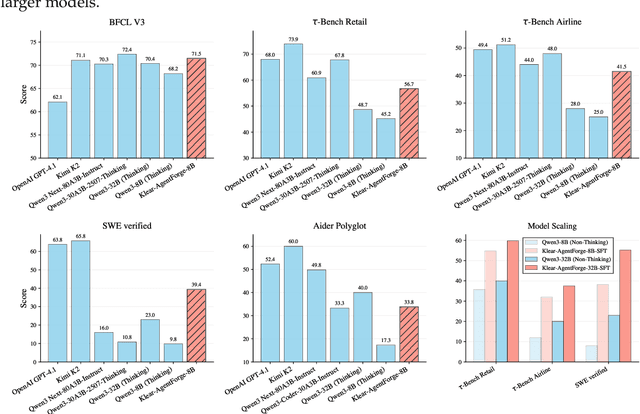
Despite the proliferation of powerful agentic models, the lack of critical post-training details hinders the development of strong counterparts in the open-source community. In this study, we present a comprehensive and fully open-source pipeline for training a high-performance agentic model for interacting with external tools and environments, named Klear-Qwen3-AgentForge, starting from the Qwen3-8B base model. We design effective supervised fine-tuning (SFT) with synthetic data followed by multi-turn reinforcement learning (RL) to unlock the potential for multiple diverse agentic tasks. We perform exclusive experiments on various agentic benchmarks in both tool use and coding domains. Klear-Qwen3-AgentForge-8B achieves state-of-the-art performance among LLMs of similar size and remains competitive with significantly larger models.
RLEP: Reinforcement Learning with Experience Replay for LLM Reasoning
Jul 10, 2025



Reinforcement learning (RL) for large language models is an energy-intensive endeavor: training can be unstable, and the policy may gradually drift away from its pretrained weights. We present \emph{RLEP}\, -- \,Reinforcement Learning with Experience rePlay\, -- \,a two-phase framework that first collects verified trajectories and then replays them during subsequent training. At every update step, the policy is optimized on mini-batches that blend newly generated rollouts with these replayed successes. By replaying high-quality examples, RLEP steers the model away from fruitless exploration, focuses learning on promising reasoning paths, and delivers both faster convergence and stronger final performance. On the Qwen2.5-Math-7B base model, RLEP reaches baseline peak accuracy with substantially fewer updates and ultimately surpasses it, improving accuracy on AIME-2024 from 38.2% to 39.9%, on AIME-2025 from 19.8% to 22.3%, and on AMC-2023 from 77.0% to 82.2%. Our code, datasets, and checkpoints are publicly available at https://github.com/Kwai-Klear/RLEP to facilitate reproducibility and further research.
Transfer learning to decode brain states reflecting the relationship between cognitive tasks
Jun 14, 2022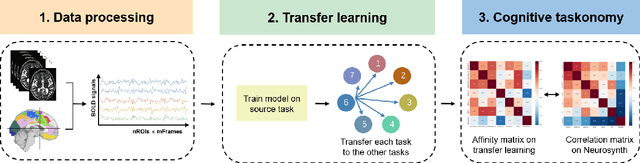
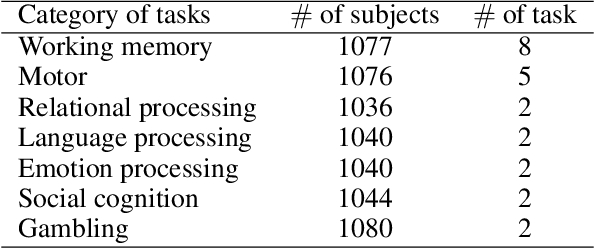
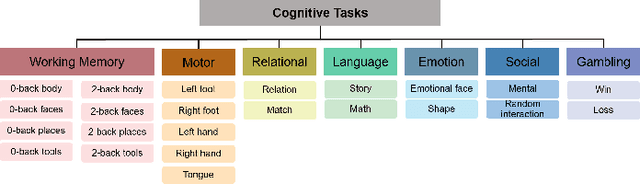
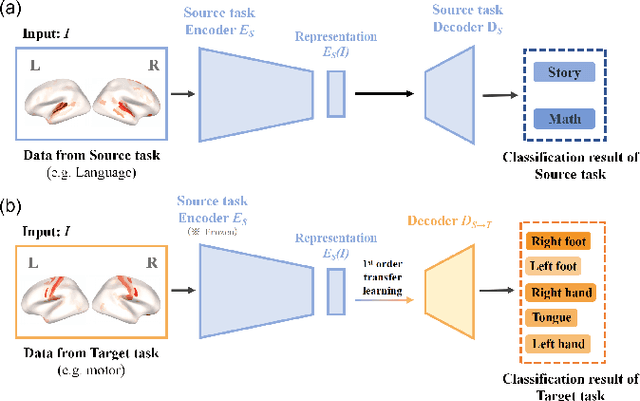
Transfer learning improves the performance of the target task by leveraging the data of a specific source task: the closer the relationship between the source and the target tasks, the greater the performance improvement by transfer learning. In neuroscience, the relationship between cognitive tasks is usually represented by similarity of activated brain regions or neural representation. However, no study has linked transfer learning and neuroscience to reveal the relationship between cognitive tasks. In this study, we propose a transfer learning framework to reflect the relationship between cognitive tasks, and compare the task relations reflected by transfer learning and by the overlaps of brain regions (e.g., neurosynth). Our results of transfer learning create cognitive taskonomy to reflect the relationship between cognitive tasks which is well in line with the task relations derived from neurosynth. Transfer learning performs better in task decoding with fMRI data if the source and target cognitive tasks activate similar brain regions. Our study uncovers the relationship of multiple cognitive tasks and provides guidance for source task selection in transfer learning for neural decoding based on small-sample data.