 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoordination via predictive assistants: time series algorithms and game-theoretic analysis
Oct 05, 2018
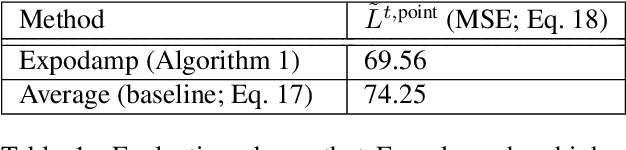

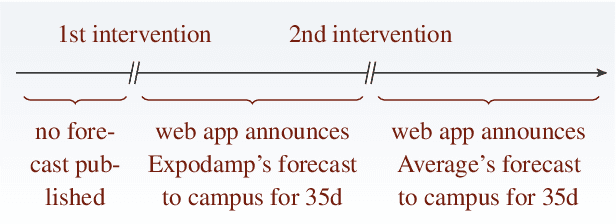
We study data-driven assistants that provide congestion forecasts to users of crowded facilities (roads, cafeterias, etc.), to support coordination between them. Having multiple agents and feedback loops from predictions to outcomes, new problems arise in terms of choosing (1) objective and (2) algorithms for such assistants. Addressing (1), we pick classical prediction accuracy as objective and establish general conditions under which optimizing it is equivalent to "solving" the coordination problem in an idealized game-theoretic sense -- selecting a certain Bayesian Nash equilibrium (BNE). Then we prove the existence of an assistant-based "solution" even for large-scale (nonatomic), aggregated settings. This entails a new BNE existence result. Addressing (2), we propose an exponential smoothing-based algorithm on time series data. We prove its optimality w.r.t.\ the prediction objective under a state-space model for the large-scale setting. We also provide a proof-of-concept algorithm and convergence guarantees for a small-scale, non-aggregated setting. We validate our algorithm in a large-scale experiment in a real cafeteria.