 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCapturing cross-session neural population variability through self-supervised identification of consistent neuron ensembles
May 19, 2022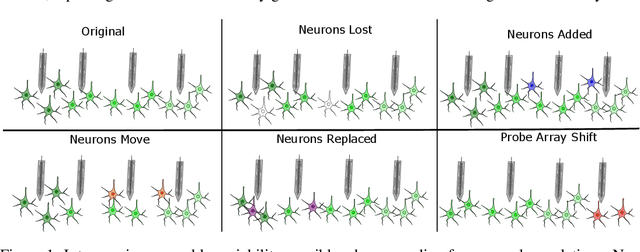

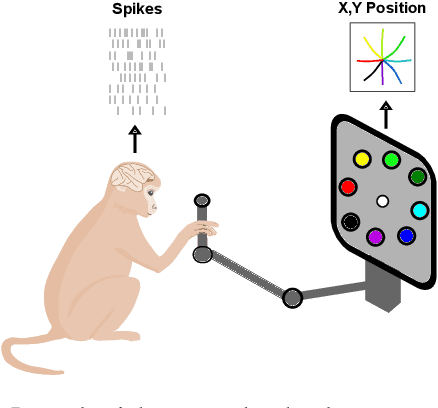

Decoding stimuli or behaviour from recorded neural activity is a common approach to interrogate brain function in research, and an essential part of brain-computer and brain-machine interfaces. Reliable decoding even from small neural populations is possible because high dimensional neural population activity typically occupies low dimensional manifolds that are discoverable with suitable latent variable models. Over time however, drifts in activity of individual neurons and instabilities in neural recording devices can be substantial, making stable decoding over days and weeks impractical. While this drift cannot be predicted on an individual neuron level, population level variations over consecutive recording sessions such as differing sets of neurons and varying permutations of consistent neurons in recorded data may be learnable when the underlying manifold is stable over time. Classification of consistent versus unfamiliar neurons across sessions and accounting for deviations in the order of consistent recording neurons in recording datasets over sessions of recordings may then maintain decoding performance. In this work we show that self-supervised training of a deep neural network can be used to compensate for this inter-session variability. As a result, a sequential autoencoding model can maintain state-of-the-art behaviour decoding performance for completely unseen recording sessions several days into the future. Our approach only requires a single recording session for training the model, and is a step towards reliable, recalibration-free brain computer interfaces.
Robust alignment of cross-session recordings of neural population activity by behaviour via unsupervised domain adaptation
Feb 16, 2022



Neural population activity relating to behaviour is assumed to be inherently low-dimensional despite the observed high dimensionality of data recorded using multi-electrode arrays. Therefore, predicting behaviour from neural population recordings has been shown to be most effective when using latent variable models. Over time however, the activity of single neurons can drift, and different neurons will be recorded due to movement of implanted neural probes. This means that a decoder trained to predict behaviour on one day performs worse when tested on a different day. On the other hand, evidence suggests that the latent dynamics underlying behaviour may be stable even over months and years. Based on this idea, we introduce a model capable of inferring behaviourally relevant latent dynamics from previously unseen data recorded from the same animal, without any need for decoder recalibration. We show that unsupervised domain adaptation combined with a sequential variational autoencoder, trained on several sessions, can achieve good generalisation to unseen data and correctly predict behaviour where conventional methods fail. Our results further support the hypothesis that behaviour-related neural dynamics are low-dimensional and stable over time, and will enable more effective and flexible use of brain computer interface technologies.