 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWireless Network Demands of Data Products from Small Uncrewed Aerial Systems at Hurricane Ian
Mar 22, 2023



Data collected at Hurricane Ian (2022) quantifies the demands that small uncrewed aerial systems (UAS), or drones, place on the network communication infrastructure and identifies gaps in the field. Drones have been increasingly used since Hurricane Katrina (2005) for disaster response, however getting the data from the drone to the appropriate decision makers throughout incident command in a timely fashion has been problematic. These delays have persisted even as countries such as the USA have made significant investments in wireless infrastructure, rapidly deployable nodes, and an increase in commercial satellite solutions. Hurricane Ian serves as a case study of the mismatch between communications needs and capabilities. In the first four days of the response, nine drone teams flew 34 missions under the direction of the State of Florida FL-UAS1, generating 636GB of data. The teams had access to six different wireless communications networks but had to resort to physically transferring data to the nearest intact emergency operations center in order to make the data available to the relevant agencies. The analysis of the mismatch contributes a model of the drone data-to-decision workflow in a disaster and quantifies wireless network communication requirements throughout the workflow in five factors. Four of the factors-availability, bandwidth, burstiness, and spatial distribution-were previously identified from analyses of Hurricanes Harvey (2017) and Michael (2018). This work adds upload rate as a fifth attribute. The analysis is expected to improve drone design and edge computing schemes as well as inform wireless communication research and development.
Applications of Robots for COVID-19 Response
Aug 16, 2020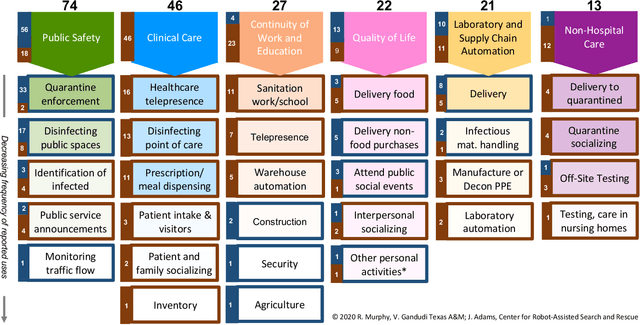
This paper reviews 262 reports appearing between March 27 and July 4, 2020, in the press, social media, and scientific literature describing 203 instances of actual use of 104 different models of ground and aerial robots for the COVID19 response. The reports are organized by stakeholders and work domain into a novel taxonomy of six application categories, reflecting major differences in work envelope, adoption strategy, and human-robot interaction constraints. Each application category is further divided into a total of 30 subcategories based on differences in mission. The largest number of reported instances were for public safety (74 out of 203) and clinical care (46), though robots for quality of life (27), continuity of work and education (22), laboratory and supply chain automation (21), and non-clinical care (13) were notable. Ground robots were used more frequently (119) than aerial systems (84), but unlike ground robots, aerial applications appeared to take advantage of existing general purpose platforms that were used for multiple applications and missions. Of the 104 models of robots, 82 were determined to be commercially available or already existed as a prototype, 11 were modifications to existing robots, 11 were built from scratch. Teleoperation dominated the control style (105 instances), with the majority of those applications intentionally providing remote presence and thus not amenable to full autonomy in the future. Automation accounted for 74 instances and taskable agency forms of autonomy, 24. The data suggests areas for further research in autonomy, human-robot interaction, and adaptability.