 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProactive Distributed Constraint Optimization of Heterogeneous Incident Vehicle Teams
Jul 16, 2022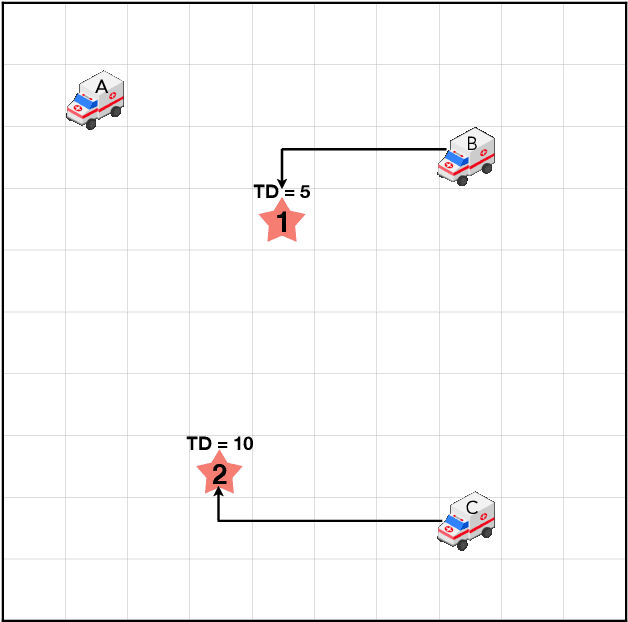

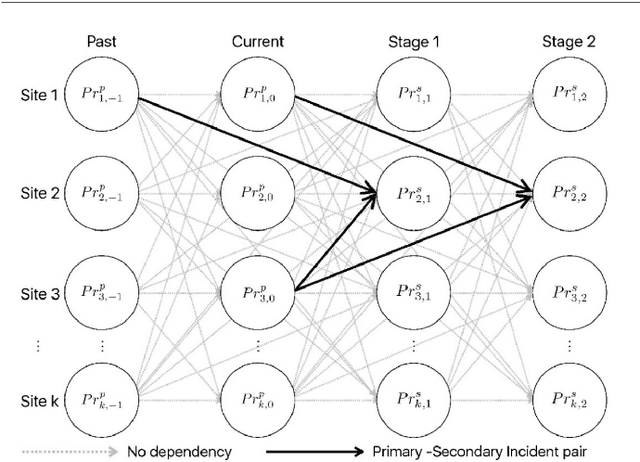
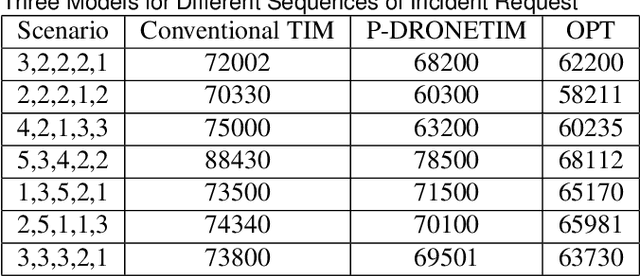
Traditionally, traffic incident management (TIM) programs coordinate the deployment of emergency resources to immediate incident requests without accommodating the interdependencies on incident evolutions in the environment. However, ignoring inherent interdependencies on the evolution of incidents in the environment while making current deployment decisions is shortsighted, and the resulting naive deployment strategy can significantly worsen the overall incident delay impact on the network. The interdependencies on incident evolution in the environment, including those between incident occurrences, and those between resource availability in near-future requests and the anticipated duration of the immediate incident request, should be considered through a look-ahead model when making current-stage deployment decisions. This study develops a new proactive framework based on the distributed constraint optimization problem (DCOP) to address the above limitations, overcoming conventional TIM models that cannot accommodate the dependencies in the TIM problem. Furthermore, the optimization objective is formulated to incorporate Unmanned Aerial Vehicles (UAVs). The UAVs' role in TIM includes exploring uncertain traffic conditions, detecting unexpected events, and augmenting information from roadway traffic sensors. Robustness analysis of our model for multiple TIM scenarios shows satisfactory performance using local search exploration heuristics. Overall, our model reports a significant reduction in total incident delay compared to conventional TIM models. With UAV support, we demonstrate a further decrease in the overall incident delay through the shorter response time of emergency vehicles, and a reduction in uncertainties associated with the estimated incident delay impact.
Temporal Multimodal Multivariate Learning
Jun 14, 2022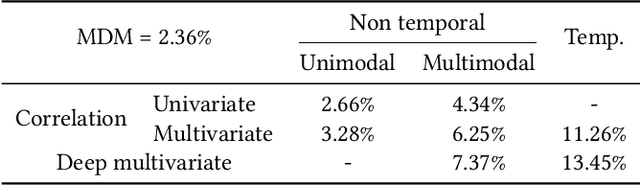
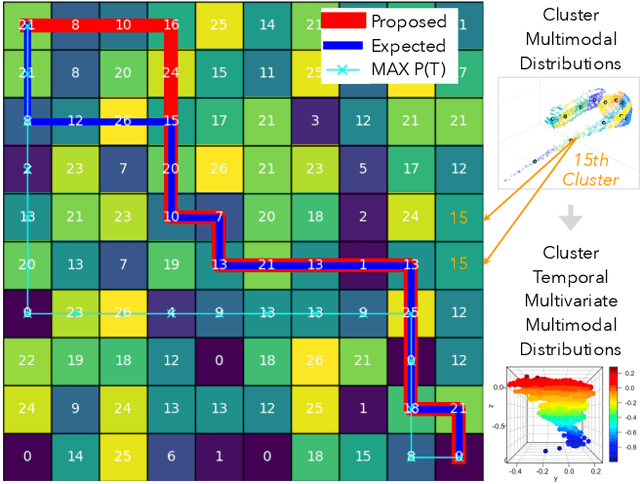
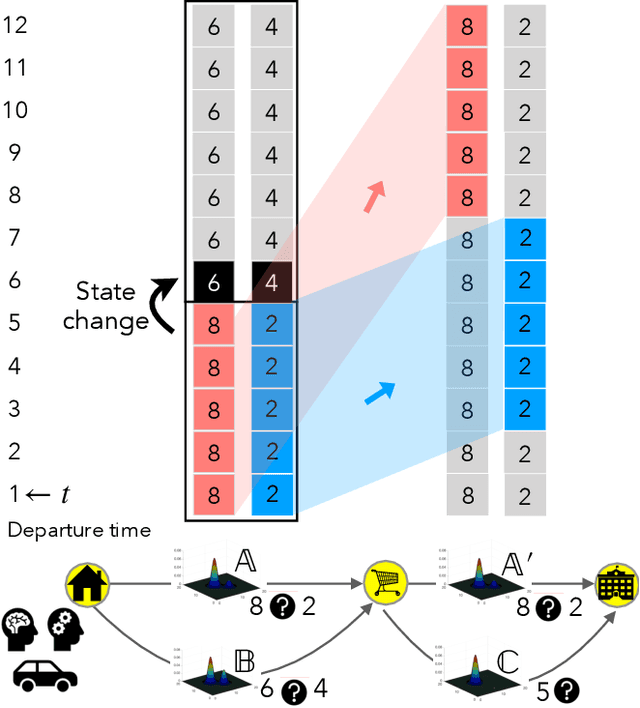
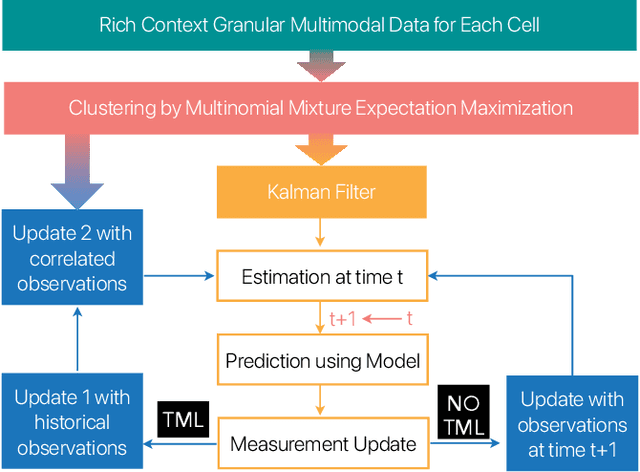
We introduce temporal multimodal multivariate learning, a new family of decision making models that can indirectly learn and transfer online information from simultaneous observations of a probability distribution with more than one peak or more than one outcome variable from one time stage to another. We approximate the posterior by sequentially removing additional uncertainties across different variables and time, based on data-physics driven correlation, to address a broader class of challenging time-dependent decision-making problems under uncertainty. Extensive experiments on real-world datasets ( i.e., urban traffic data and hurricane ensemble forecasting data) demonstrate the superior performance of the proposed targeted decision-making over the state-of-the-art baseline prediction methods across various settings.