 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNomicLaw: Emergent Trust and Strategic Argumentation in LLMs During Collaborative Law-Making
Aug 07, 2025Recent advancements in large language models (LLMs) have extended their capabilities from basic text processing to complex reasoning tasks, including legal interpretation, argumentation, and strategic interaction. However, empirical understanding of LLM behavior in open-ended, multi-agent settings especially those involving deliberation over legal and ethical dilemmas remains limited. We introduce NomicLaw, a structured multi-agent simulation where LLMs engage in collaborative law-making, responding to complex legal vignettes by proposing rules, justifying them, and voting on peer proposals. We quantitatively measure trust and reciprocity via voting patterns and qualitatively assess how agents use strategic language to justify proposals and influence outcomes. Experiments involving homogeneous and heterogeneous LLM groups demonstrate how agents spontaneously form alliances, betray trust, and adapt their rhetoric to shape collective decisions. Our results highlight the latent social reasoning and persuasive capabilities of ten open-source LLMs and provide insights into the design of future AI systems capable of autonomous negotiation, coordination and drafting legislation in legal settings.
Pedestrian crossing decisions can be explained by bounded optimal decision-making under noisy visual perception
Feb 06, 2024This paper presents a model of pedestrian crossing decisions, based on the theory of computational rationality. It is assumed that crossing decisions are boundedly optimal, with bounds on optimality arising from human cognitive limitations. While previous models of pedestrian behaviour have been either 'black-box' machine learning models or mechanistic models with explicit assumptions about cognitive factors, we combine both approaches. Specifically, we model mechanistically noisy human visual perception and assumed rewards in crossing, but we use reinforcement learning to learn bounded optimal behaviour policy. The model reproduces a larger number of known empirical phenomena than previous models, in particular: (1) the effect of the time to arrival of an approaching vehicle on whether the pedestrian accepts the gap, the effect of the vehicle's speed on both (2) gap acceptance and (3) pedestrian timing of crossing in front of yielding vehicles, and (4) the effect on this crossing timing of the stopping distance of the yielding vehicle. Notably, our findings suggest that behaviours previously framed as 'biases' in decision-making, such as speed-dependent gap acceptance, might instead be a product of rational adaptation to the constraints of visual perception. Our approach also permits fitting the parameters of cognitive constraints and rewards per individual, to better account for individual differences. To conclude, by leveraging both RL and mechanistic modelling, our model offers novel insights about pedestrian behaviour, and may provide a useful foundation for more accurate and scalable pedestrian models.
Modeling human road crossing decisions as reward maximization with visual perception limitations
Jan 27, 2023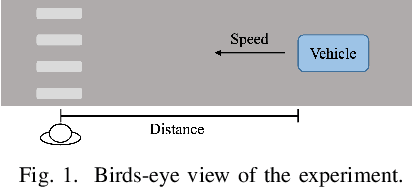
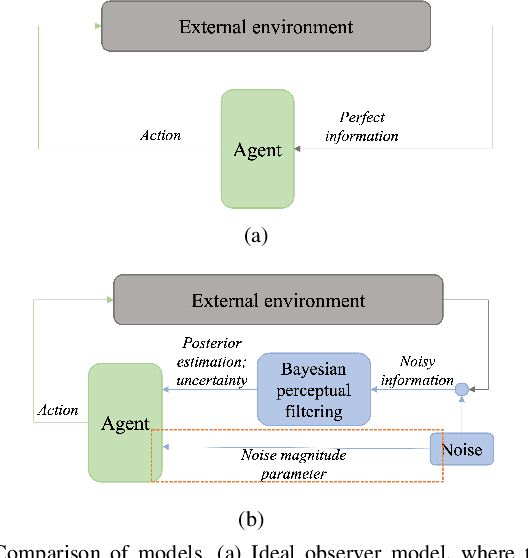
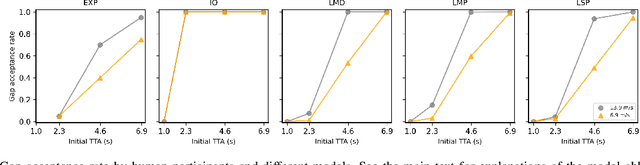
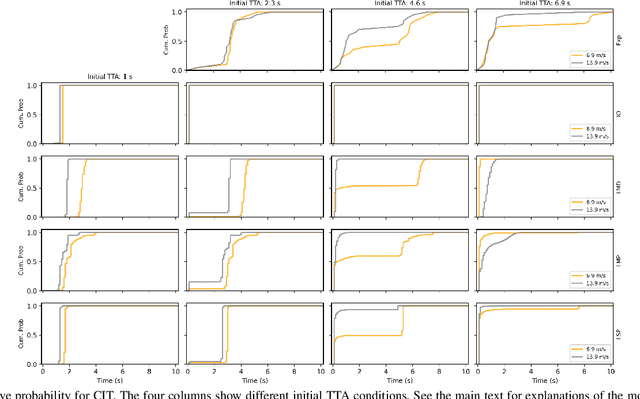
Understanding the interaction between different road users is critical for road safety and automated vehicles (AVs). Existing mathematical models on this topic have been proposed based mostly on either cognitive or machine learning (ML) approaches. However, current cognitive models are incapable of simulating road user trajectories in general scenarios, and ML models lack a focus on the mechanisms generating the behavior and take a high-level perspective which can cause failures to capture important human-like behaviors. Here, we develop a model of human pedestrian crossing decisions based on computational rationality, an approach using deep reinforcement learning (RL) to learn boundedly optimal behavior policies given human constraints, in our case a model of the limited human visual system. We show that the proposed combined cognitive-RL model captures human-like patterns of gap acceptance and crossing initiation time. Interestingly, our model's decisions are sensitive to not only the time gap, but also the speed of the approaching vehicle, something which has been described as a "bias" in human gap acceptance behavior. However, our results suggest that this is instead a rational adaption to human perceptual limitations. Moreover, we demonstrate an approach to accounting for individual differences in computational rationality models, by conditioning the RL policy on the parameters of the human constraints. Our results demonstrate the feasibility of generating more human-like road user behavior by combining RL with cognitive models.