 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNative-Domain Cross-Attention for Camera-LiDAR Extrinsic Calibration Under Large Initial Perturbations
Mar 31, 2026Accurate camera-LiDAR fusion relies on precise extrinsic calibration, which fundamentally depends on establishing reliable cross-modal correspondences under potentially large misalignments. Existing learning-based methods typically project LiDAR points into depth maps for feature fusion, which distorts 3D geometry and degrades performance when the extrinsic initialization is far from the ground truth. To address this issue, we propose an extrinsic-aware cross-attention framework that directly aligns image patches and LiDAR point groups in their native domains. The proposed attention mechanism explicitly injects extrinsic parameter hypotheses into the correspondence modeling process, enabling geometry-consistent cross-modal interaction without relying on projected 2D depth maps. Extensive experiments on the KITTI and nuScenes benchmarks demonstrate that our method consistently outperforms state-of-the-art approaches in both accuracy and robustness. Under large extrinsic perturbations, our approach achieves accurate calibration in 88% of KITTI cases and 99% of nuScenes cases, substantially surpassing the second-best baseline. We have open sourced our code on https://github.com/gitouni/ProjFusion to benefit the community.
Iterative Camera-LiDAR Extrinsic Optimization via Surrogate Diffusion
Nov 17, 2024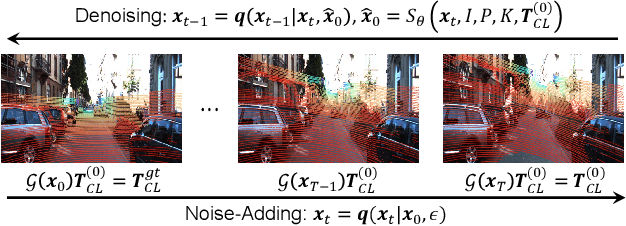
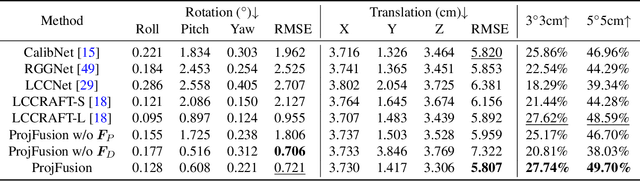
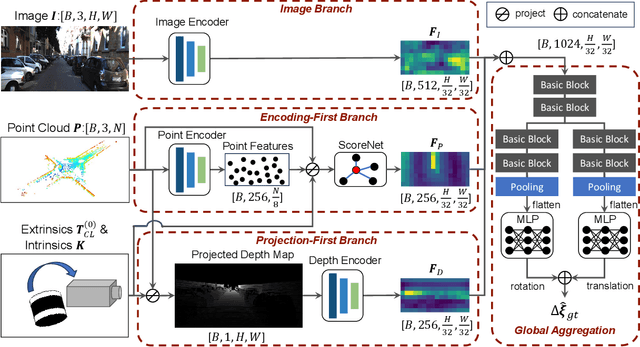
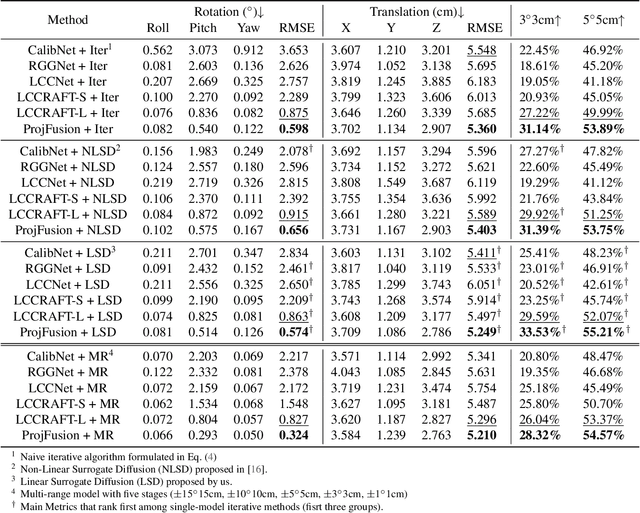
Cameras and LiDAR are essential sensors for autonomous vehicles. Camera-LiDAR data fusion compensate for deficiencies of stand-alone sensors but relies on precise extrinsic calibration. Many learning-based calibration methods predict extrinsic parameters in a single step. Driven by the growing demand for higher accuracy, a few approaches utilize multi-range models or integrate multiple methods to improve extrinsic parameter predictions, but these strategies incur extended training times and require additional storage for separate models. To address these issues, we propose a single-model iterative approach based on surrogate diffusion to significantly enhance the capacity of individual calibration methods. By applying a buffering technique proposed by us, the inference time of our surrogate diffusion is 43.7% less than that of multi-range models. Additionally, we create a calibration network as our denoiser, featuring both projection-first and encoding-first branches for effective point feature extraction. Extensive experiments demonstrate that our diffusion model outperforms other single-model iterative methods and delivers competitive results compared to multi-range models. Our denoiser exceeds state-of-the-art calibration methods, reducing the rotation error by 24.5% compared to the second-best method. Furthermore, with the proposed diffusion applied, it achieves 20.4% less rotation error and 9.6% less translation error.
Visual-LiDAR Odometry and Mapping with Monocular Scale Correction and Motion Compensation
Apr 18, 2023



This paper presents a novel visual-LiDAR odometry and mapping method with low-drift characteristics. The proposed method is based on two popular approaches, ORB-SLAM and A-LOAM, with monocular scale correction and visual-assisted LiDAR motion compensation modifications. The scale corrector calculates the proportion between the depth of image keypoints recovered by triangulation and that provided by LiDAR, using an outlier rejection process for accuracy improvement. Concerning LiDAR motion compensation, the visual odometry approach gives the initial guesses of LiDAR motions for better performance. This methodology is not only applicable to high-resolution LiDAR but can also adapt to low-resolution LiDAR. To evaluate the proposed SLAM system's robustness and accuracy, we conducted experiments on the KITTI Odometry and S3E datasets. Experimental results illustrate that our method significantly outperforms standalone ORB-SLAM2 and A-LOAM. Furthermore, regarding the accuracy of visual odometry with scale correction, our method performs similarly to the stereo-mode ORB-SLAM2.
Virtual Model Control for Wheel-legged Robotic Systems with Prescribed Transient Performance
Nov 09, 2020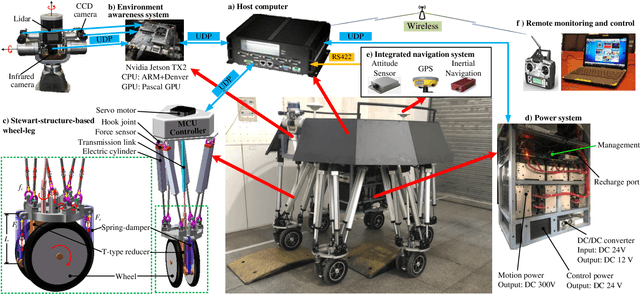
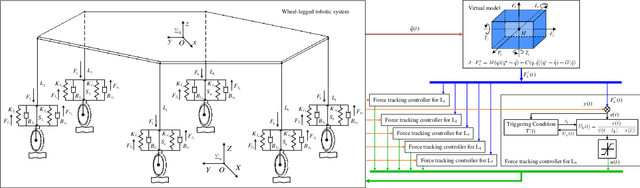
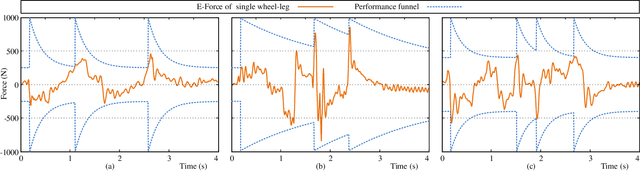
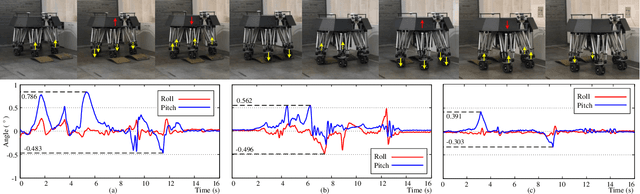
This work proposes a posture adjustment strategy for wheel-legged mechanisms via virtual model control with prescribed transient performance. A simple model of a rigid block subjected to a 6-dimensional force at the center of gravity (CoG) is introduced to be the virtual model of the wheel-legged control system. The force tracking of the wheel-legs is realized with prescribed transient performance based on the funnel control strategy. To improve the robustness of the scheme, an event-triggering condition is designed for on-line segment of the funnel function, such that the force tracking error evolves inside the performance funnel with proved convergence. The absence of Zeno behavior for the event-based mechanism is also guaranteed. With the force references of the wheel-legs are planned for the vector sum tracks the 6-dimensional force from the virtual model, the posture adjustment is achieved on uneven roads by the force tracking of wheel-legs. Experimental results are presented to validate the stability and effectiveness of the proposed method.