 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIterative Camera-LiDAR Extrinsic Optimization via Surrogate Diffusion
Paper and Code
Nov 17, 2024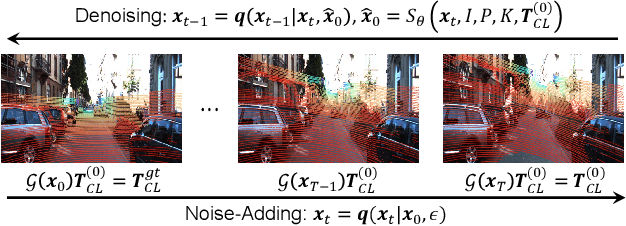
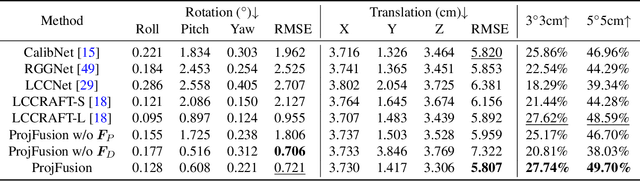
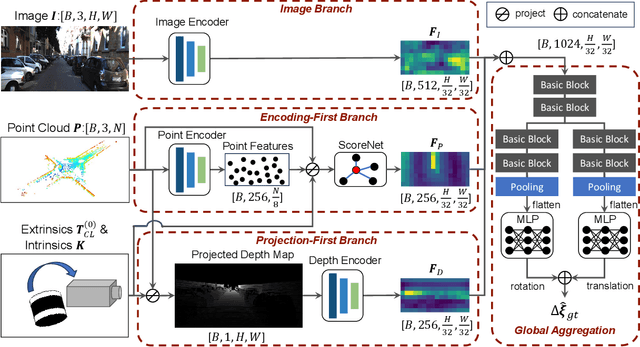
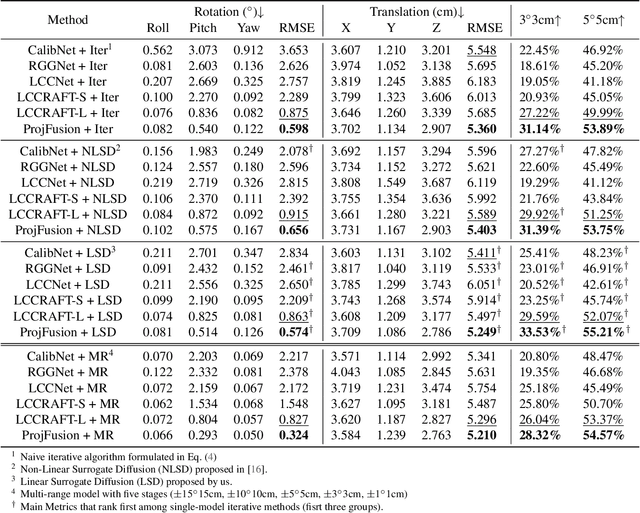
Cameras and LiDAR are essential sensors for autonomous vehicles. Camera-LiDAR data fusion compensate for deficiencies of stand-alone sensors but relies on precise extrinsic calibration. Many learning-based calibration methods predict extrinsic parameters in a single step. Driven by the growing demand for higher accuracy, a few approaches utilize multi-range models or integrate multiple methods to improve extrinsic parameter predictions, but these strategies incur extended training times and require additional storage for separate models. To address these issues, we propose a single-model iterative approach based on surrogate diffusion to significantly enhance the capacity of individual calibration methods. By applying a buffering technique proposed by us, the inference time of our surrogate diffusion is 43.7% less than that of multi-range models. Additionally, we create a calibration network as our denoiser, featuring both projection-first and encoding-first branches for effective point feature extraction. Extensive experiments demonstrate that our diffusion model outperforms other single-model iterative methods and delivers competitive results compared to multi-range models. Our denoiser exceeds state-of-the-art calibration methods, reducing the rotation error by 24.5% compared to the second-best method. Furthermore, with the proposed diffusion applied, it achieves 20.4% less rotation error and 9.6% less translation error.