 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-object Detection, Tracking and Prediction in Rugged Dynamic Environments
Aug 23, 2023



Multi-object tracking (MOT) has important applications in monitoring, logistics, and other fields. This paper develops a real-time multi-object tracking and prediction system in rugged environments. A 3D object detection algorithm based on Lidar-camera fusion is designed to detect the target objects. Based on the Hungarian algorithm, this paper designs a 3D multi-object tracking algorithm with an adaptive threshold to realize the stable matching and tracking of the objects. We combine Memory Augmented Neural Networks (MANN) and Kalman filter to achieve 3D trajectory prediction on rugged terrains. Besides, we realize a new dynamic SLAM by using the results of multi-object tracking to remove dynamic points for better SLAM performance and static map. To verify the effectiveness of the proposed multi-object tracking and prediction system, several simulations and physical experiments are conducted. The results show that the proposed system can track dynamic objects and provide future trajectory and a more clean static map in real-time.
Hierarchical Adaptive Voxel-guided Sampling for Real-time Applications in Large-scale Point Clouds
May 23, 2023While point-based neural architectures have demonstrated their efficacy, the time-consuming sampler currently prevents them from performing real-time reasoning on scene-level point clouds. Existing methods attempt to overcome this issue by using random sampling strategy instead of the commonly-adopted farthest point sampling~(FPS), but at the expense of lower performance. So the effectiveness/efficiency trade-off remains under-explored. In this paper, we reveal the key to high-quality sampling is ensuring an even spacing between points in the subset, which can be naturally obtained through a grid. Based on this insight, we propose a hierarchical adaptive voxel-guided point sampler with linear complexity and high parallelization for real-time applications. Extensive experiments on large-scale point cloud detection and segmentation tasks demonstrate that our method achieves competitive performance with the most powerful FPS, at an amazing speed that is more than 100 times faster. This breakthrough in efficiency addresses the bottleneck of the sampling step when handling scene-level point clouds. Furthermore, our sampler can be easily integrated into existing models and achieves a 20$\sim$80\% reduction in runtime with minimal effort. The code will be available at https://github.com/OuyangJunyuan/pointcloud-3d-detector-tensorrt
Det6D: A Ground-Aware Full-Pose 3D Object Detector for Improving Terrain Robustness
Jul 19, 2022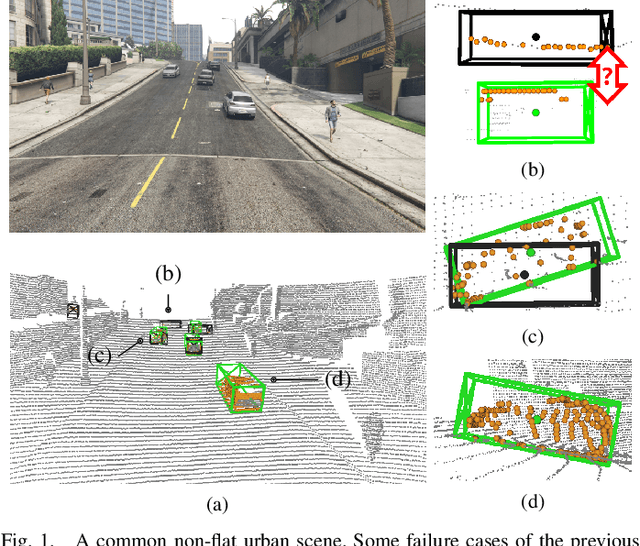
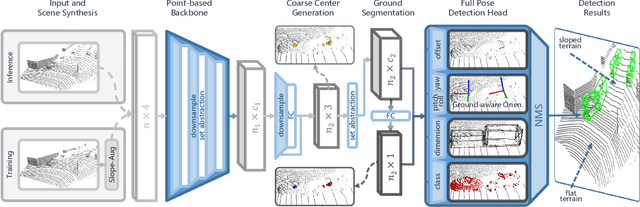


Accurate 3D object detection with LiDAR is critical for autonomous driving. Existing research is all based on the flat-world assumption. However, the actual road can be complex with steep sections, which breaks the premise. Current methods suffer from performance degradation in this case due to difficulty correctly detecting objects on sloped terrain. In this work, we propose Det6D, the first full-degree-of-freedom 3D object detector without spatial and postural limitations, to improve terrain robustness. We choose the point-based framework by founding their capability of detecting objects in the entire spatial range. To predict full-degree poses, including pitch and roll, we design a ground-aware orientation branch that leverages the local ground constraints. Given the difficulty of long-tail non-flat scene data collection and 6D pose annotation, we present Slope-Aug, a data augmentation method for synthesizing non-flat terrain from existing datasets recorded in flat scenes. Experiments on various datasets demonstrate the effectiveness and robustness of our method in different terrains. We further conducted an extended experiment to explore how the network predicts the two extra poses. The proposed modules are plug-and-play for existing point-based frameworks. The code is available at https://github.com/HITSZ-NRSL/De6D.