 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Evidential Reliability In Pattern Recognition Based On Intuitionistic Fuzzy Sets
Oct 30, 2024



Determining the reliability of evidence sources is a crucial topic in Dempster-Shafer theory (DST). Previous approaches have addressed high conflicts between evidence sources using discounting methods, but these methods may not ensure the high efficiency of classification models. In this paper, we consider the combination of DS theory and Intuitionistic Fuzzy Sets (IFS) and propose an algorithm for quantifying the reliability of evidence sources, called Fuzzy Reliability Index (FRI). The FRI algorithm is based on decision quantification rules derived from IFS, defining the contribution of different BPAs to correct decisions and deriving the evidential reliability from these contributions. The proposed method effectively enhances the rationality of reliability estimation for evidence sources, making it particularly suitable for classification decision problems in complex scenarios. Subsequent comparisons with DST-based algorithms and classical machine learning algorithms demonstrate the superiority and generalizability of the FRI algorithm. The FRI algorithm provides a new perspective for future decision probability conversion and reliability analysis of evidence sources.
Reliability Assessment of Information Sources Based on Random Permutation Set
Oct 30, 2024In pattern recognition, handling uncertainty is a critical challenge that significantly affects decision-making and classification accuracy. Dempster-Shafer Theory (DST) is an effective reasoning framework for addressing uncertainty, and the Random Permutation Set (RPS) extends DST by additionally considering the internal order of elements, forming a more ordered extension of DST. However, there is a lack of a transformation method based on permutation order between RPS and DST, as well as a sequence-based probability transformation method for RPS. Moreover, the reliability of RPS sources remains an issue that requires attention. To address these challenges, this paper proposes an RPS transformation approach and a probability transformation method tailored for RPS. On this basis, a reliability computation method for RPS sources, based on the RPS probability transformation, is introduced and applied to pattern recognition. Experimental results demonstrate that the proposed approach effectively bridges the gap between DST and RPS and achieves superior recognition accuracy in classification problems.
Learning Consistency Pursued Correlation Filters for Real-Time UAV Tracking
Aug 09, 2020


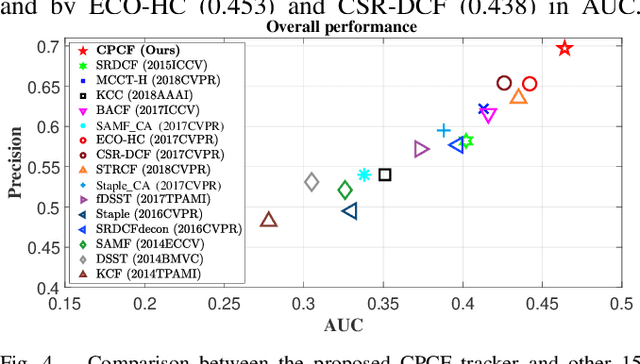
Correlation filter (CF)-based methods have demonstrated exceptional performance in visual object tracking for unmanned aerial vehicle (UAV) applications, but suffer from the undesirable boundary effect. To solve this issue, spatially regularized correlation filters (SRDCF) proposes the spatial regularization to penalize filter coefficients, thereby significantly improving the tracking performance. However, the temporal information hidden in the response maps is not considered in SRDCF, which limits the discriminative power and the robustness for accurate tracking. This work proposes a novel approach with dynamic consistency pursued correlation filters, i.e., the CPCF tracker. Specifically, through a correlation operation between adjacent response maps, a practical consistency map is generated to represent the consistency level across frames. By minimizing the difference between the practical and the scheduled ideal consistency map, the consistency level is constrained to maintain temporal smoothness, and rich temporal information contained in response maps is introduced. Besides, a dynamic constraint strategy is proposed to further improve the adaptability of the proposed tracker in complex situations. Comprehensive experiments are conducted on three challenging UAV benchmarks, i.e., UAV123@10FPS, UAVDT, and DTB70. Based on the experimental results, the proposed tracker favorably surpasses the other 25 state-of-the-art trackers with real-time running speed ($\sim$43FPS) on a single CPU.
* IROS 2020 accepted, 8 pages, 7 figures, and 2 tables