 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKinetostatics and Particle-Swarm Optimization of Vehicle-Mounted Underactuated Metamorphic Loading Manipulators
Sep 11, 2025Fixed degree-of-freedom (DoF) loading mechanisms often suffer from excessive actuators, complex control, and limited adaptability to dynamic tasks. This study proposes an innovative mechanism of underactuated metamorphic loading manipulators (UMLM), integrating a metamorphic arm with a passively adaptive gripper. The metamorphic arm exploits geometric constraints, enabling the topology reconfiguration and flexible motion trajectories without additional actuators. The adaptive gripper, driven entirely by the arm, conforms to diverse objects through passive compliance. A structural model is developed, and a kinetostatics analysis is conducted to investigate isomorphic grasping configurations. To optimize performance, Particle-Swarm Optimization (PSO) is utilized to refine the gripper's dimensional parameters, ensuring robust adaptability across various applications. Simulation results validate the UMLM's easily implemented control strategy, operational versatility, and effectiveness in grasping diverse objects in dynamic environments. This work underscores the practical potential of underactuated metamorphic mechanisms in applications requiring efficient and adaptable loading solutions. Beyond the specific design, this generalized modeling and optimization framework extends to a broader class of manipulators, offering a scalable approach to the development of robotic systems that require efficiency, flexibility, and robust performance.
Synthehicle: Multi-Vehicle Multi-Camera Tracking in Virtual Cities
Aug 30, 2022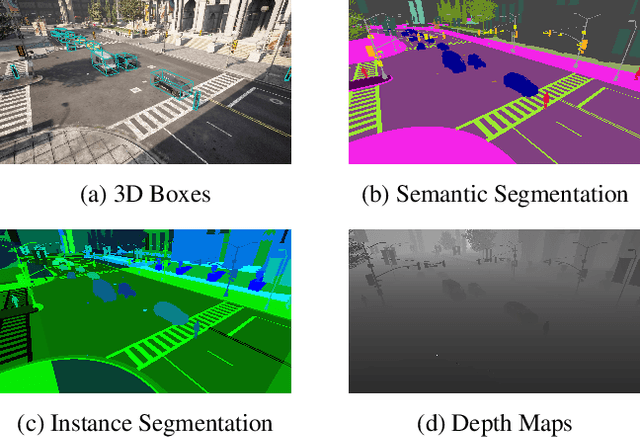
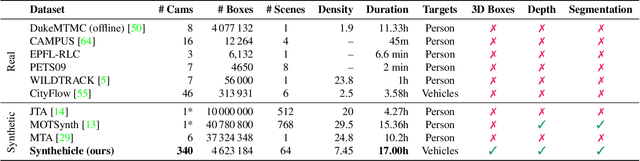

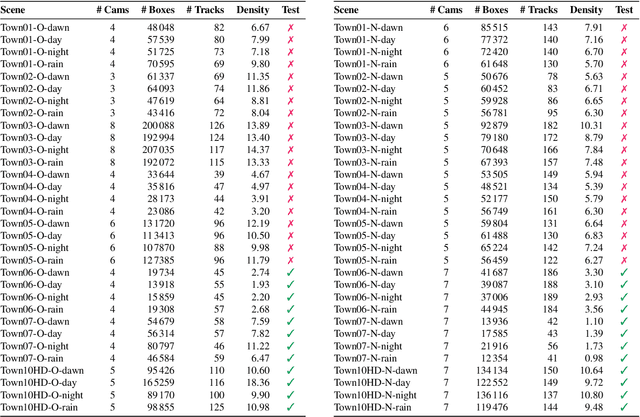
Smart City applications such as intelligent traffic routing or accident prevention rely on computer vision methods for exact vehicle localization and tracking. Due to the scarcity of accurately labeled data, detecting and tracking vehicles in 3D from multiple cameras proves challenging to explore. We present a massive synthetic dataset for multiple vehicle tracking and segmentation in multiple overlapping and non-overlapping camera views. Unlike existing datasets, which only provide tracking ground truth for 2D bounding boxes, our dataset additionally contains perfect labels for 3D bounding boxes in camera- and world coordinates, depth estimation, and instance, semantic and panoptic segmentation. The dataset consists of 17 hours of labeled video material, recorded from 340 cameras in 64 diverse day, rain, dawn, and night scenes, making it the most extensive dataset for multi-target multi-camera tracking so far. We provide baselines for detection, vehicle re-identification, and single- and multi-camera tracking. Code and data are publicly available.
The state-of-the-art in web-scale semantic information processing for cloud computing
May 18, 2013Based on integrated infrastructure of resource sharing and computing in distributed environment, cloud computing involves the provision of dynamically scalable and provides virtualized resources as services over the Internet. These applications also bring a large scale heterogeneous and distributed information which pose a great challenge in terms of the semantic ambiguity. It is critical for application services in cloud computing environment to provide users intelligent service and precise information. Semantic information processing can help users deal with semantic ambiguity and information overload efficiently through appropriate semantic models and semantic information processing technology. The semantic information processing have been successfully employed in many fields such as the knowledge representation, natural language understanding, intelligent web search, etc. The purpose of this report is to give an overview of existing technologies for semantic information processing in cloud computing environment, to propose a research direction for addressing distributed semantic reasoning and parallel semantic computing by exploiting semantic information newly available in cloud computing environment.