 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Algorithmic Reasoners informed Large Language Model for Multi-Agent Path Finding
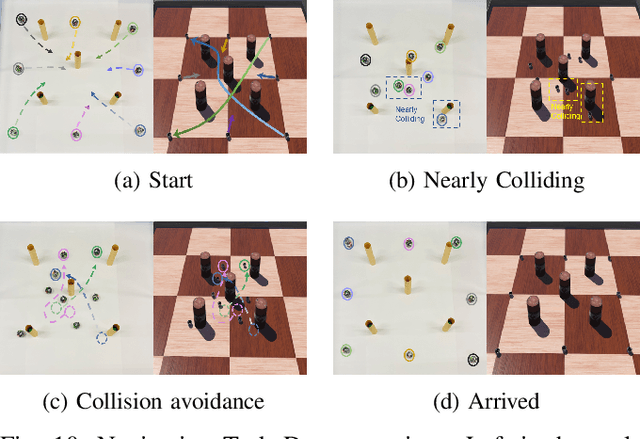
Aug 25, 2025The development and application of large language models (LLM) have demonstrated that foundational models can be utilized to solve a wide array of tasks. However, their performance in multi-agent path finding (MAPF) tasks has been less than satisfactory, with only a few studies exploring this area. MAPF is a complex problem requiring both planning and multi-agent coordination. To improve the performance of LLM in MAPF tasks, we propose a novel framework, LLM-NAR, which leverages neural algorithmic reasoners (NAR) to inform LLM for MAPF. LLM-NAR consists of three key components: an LLM for MAPF, a pre-trained graph neural network-based NAR, and a cross-attention mechanism. This is the first work to propose using a neural algorithmic reasoner to integrate GNNs with the map information for MAPF, thereby guiding LLM to achieve superior performance. LLM-NAR can be easily adapted to various LLM models. Both simulation and real-world experiments demonstrate that our method significantly outperforms existing LLM-based approaches in solving MAPF problems.
Hierarchical Consensus-Based Multi-Agent Reinforcement Learning for Multi-Robot Cooperation Tasks
Jul 11, 2024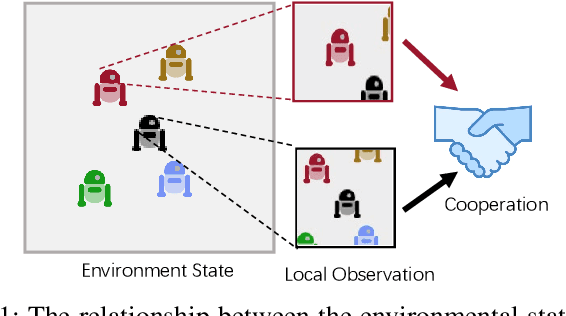
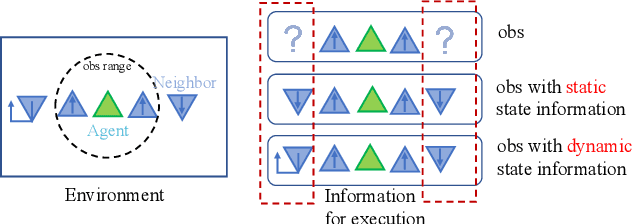

In multi-agent reinforcement learning (MARL), the Centralized Training with Decentralized Execution (CTDE) framework is pivotal but struggles due to a gap: global state guidance in training versus reliance on local observations in execution, lacking global signals. Inspired by human societal consensus mechanisms, we introduce the Hierarchical Consensus-based Multi-Agent Reinforcement Learning (HC-MARL) framework to address this limitation. HC-MARL employs contrastive learning to foster a global consensus among agents, enabling cooperative behavior without direct communication. This approach enables agents to form a global consensus from local observations, using it as an additional piece of information to guide collaborative actions during execution. To cater to the dynamic requirements of various tasks, consensus is divided into multiple layers, encompassing both short-term and long-term considerations. Short-term observations prompt the creation of an immediate, low-layer consensus, while long-term observations contribute to the formation of a strategic, high-layer consensus. This process is further refined through an adaptive attention mechanism that dynamically adjusts the influence of each consensus layer. This mechanism optimizes the balance between immediate reactions and strategic planning, tailoring it to the specific demands of the task at hand. Extensive experiments and real-world applications in multi-robot systems showcase our framework's superior performance, marking significant advancements over baselines.