 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemi-supervised Deep Reinforcement Learning in Support of IoT and Smart City Services
Oct 09, 2018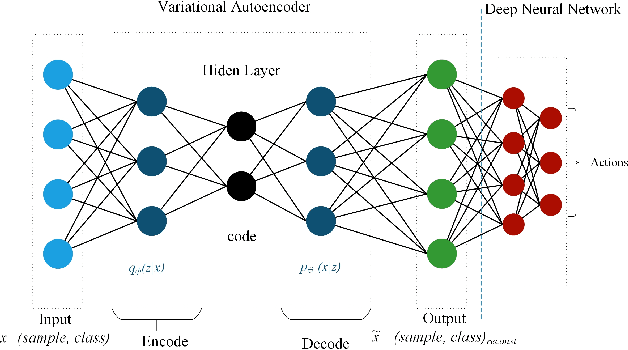
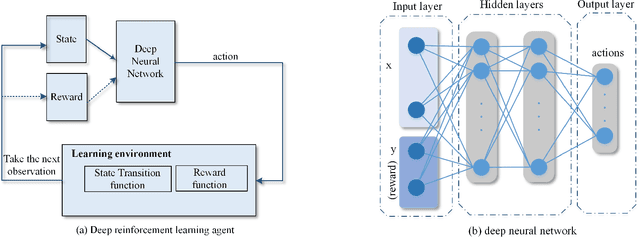
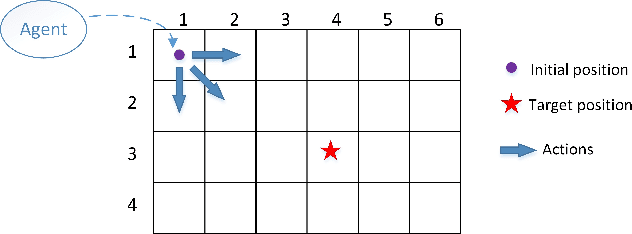
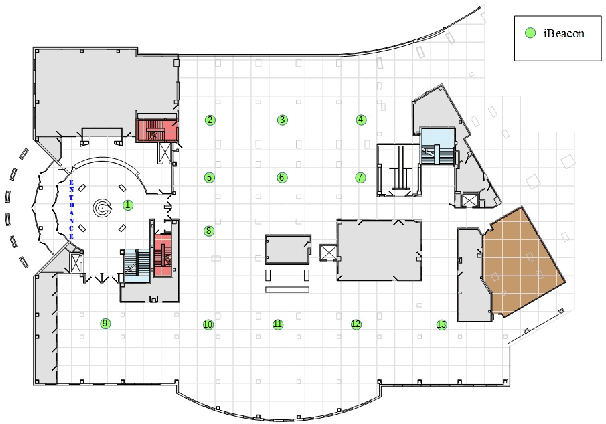
Smart services are an important element of the smart cities and the Internet of Things (IoT) ecosystems where the intelligence behind the services is obtained and improved through the sensory data. Providing a large amount of training data is not always feasible; therefore, we need to consider alternative ways that incorporate unlabeled data as well. In recent years, Deep reinforcement learning (DRL) has gained great success in several application domains. It is an applicable method for IoT and smart city scenarios where auto-generated data can be partially labeled by users' feedback for training purposes. In this paper, we propose a semi-supervised deep reinforcement learning model that fits smart city applications as it consumes both labeled and unlabeled data to improve the performance and accuracy of the learning agent. The model utilizes Variational Autoencoders (VAE) as the inference engine for generalizing optimal policies. To the best of our knowledge, the proposed model is the first investigation that extends deep reinforcement learning to the semi-supervised paradigm. As a case study of smart city applications, we focus on smart buildings and apply the proposed model to the problem of indoor localization based on BLE signal strength. Indoor localization is the main component of smart city services since people spend significant time in indoor environments. Our model learns the best action policies that lead to a close estimation of the target locations with an improvement of 23% in terms of distance to the target and at least 67% more received rewards compared to the supervised DRL model.
* 11 pages, 7 figures. Accepted for publication in IEEE Internet of Things Journal
Path Planning in Support of Smart Mobility Applications using Generative Adversarial Networks
Apr 23, 2018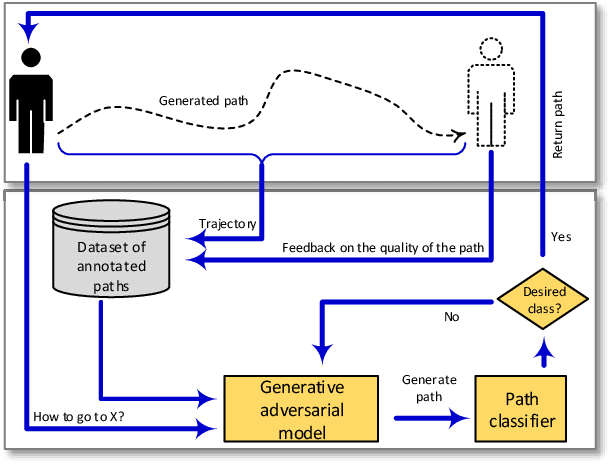
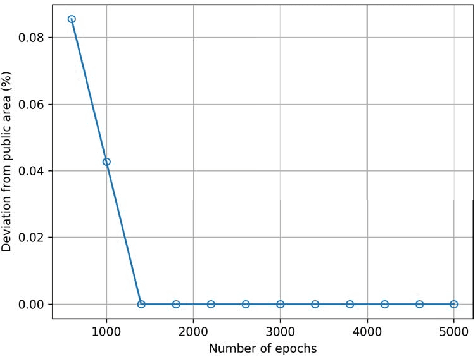
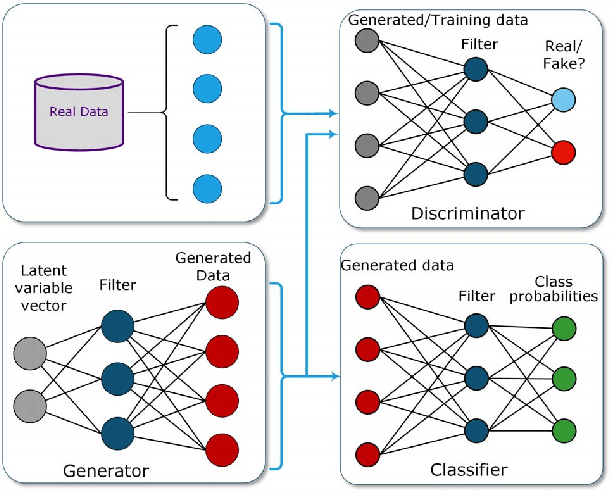
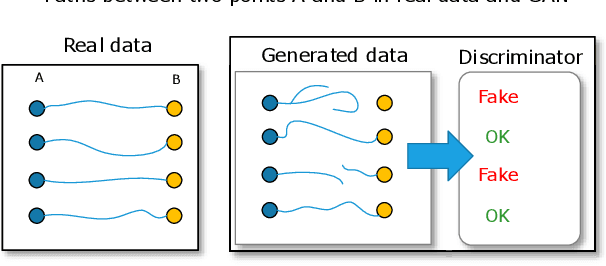
This paper describes and evaluates the use of Generative Adversarial Networks (GANs) for path planning in support of smart mobility applications such as indoor and outdoor navigation applications, individualized wayfinding for people with disabilities (e.g., vision impairments, physical disabilities, etc.), path planning for evacuations, robotic navigations, and path planning for autonomous vehicles. We propose an architecture based on GANs to recommend accurate and reliable paths for navigation applications. The proposed system can use crowd-sourced data to learn the trajectories and infer new ones. The system provides users with generated paths that help them navigate from their local environment to reach a desired location. As a use case, we experimented with the proposed method in support of a wayfinding application in an indoor environment. Our experiments assert that the generated paths are correct and reliable. The accuracy of the classification task for the generated paths is up to 99% and the quality of the generated paths has a mean opinion score of 89%.