 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDrift with Devil: Security of Multi-Sensor Fusion based Localization in High-Level Autonomous Driving under GPS Spoofing
Jun 23, 2020

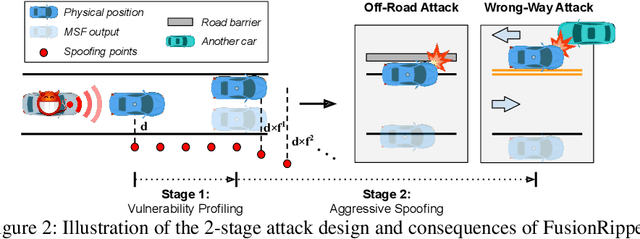
For high-level Autonomous Vehicles (AV), localization is highly security and safety critical. One direct threat to it is GPS spoofing, but fortunately, AV systems today predominantly use Multi-Sensor Fusion (MSF) algorithms that are generally believed to have the potential to practically defeat GPS spoofing. However, no prior work has studied whether today's MSF algorithms are indeed sufficiently secure under GPS spoofing, especially in AV settings. In this work, we perform the first study to fill this critical gap. As the first study, we focus on a production-grade MSF with both design and implementation level representativeness, and identify two AV-specific attack goals, off-road and wrong-way attacks. To systematically understand the security property, we first analyze the upper-bound attack effectiveness, and discover a take-over effect that can fundamentally defeat the MSF design principle. We perform a cause analysis and find that such vulnerability only appears dynamically and non-deterministically. Leveraging this insight, we design FusionRipper, a novel and general attack that opportunistically captures and exploits take-over vulnerabilities. We evaluate it on 6 real-world sensor traces, and find that FusionRipper can achieve at least 97% and 91.3% success rates in all traces for off-road and wrong-way attacks respectively. We also find that it is highly robust to practical factors such as spoofing inaccuracies. To improve the practicality, we further design an offline method that can effectively identify attack parameters with over 80% average success rates for both attack goals, with the cost of at most half a day. We also discuss promising defense directions.