 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClassifying Subjective Time Perception in a Multi-robot Control Scenario Using Eye-tracking Information
Apr 08, 2025
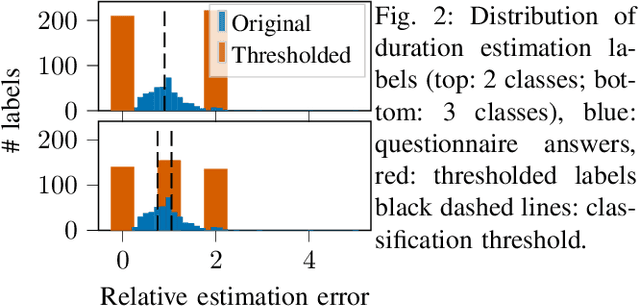
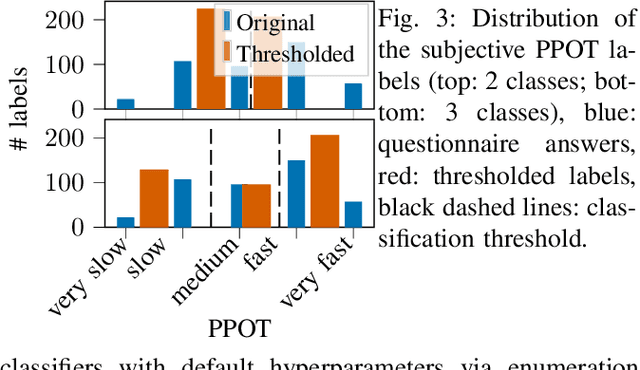
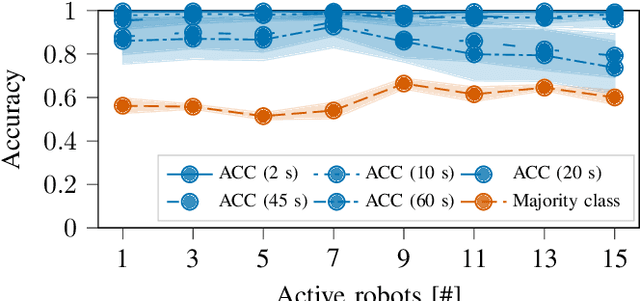
As automation and mobile robotics reshape work environments, rising expectations for productivity increase cognitive demands on human operators, leading to potential stress and cognitive overload. Accurately assessing an operator's mental state is critical for maintaining performance and well-being. We use subjective time perception, which can be altered by stress and cognitive load, as a sensitive, low-latency indicator of well-being and cognitive strain. Distortions in time perception can affect decision-making, reaction times, and overall task effectiveness, making it a valuable metric for adaptive human-swarm interaction systems. We study how human physiological signals can be used to estimate a person's subjective time perception in a human-swarm interaction scenario as example. A human operator needs to guide and control a swarm of small mobile robots. We obtain eye-tracking data that is classified for subjective time perception based on questionnaire data. Our results show that we successfully estimate a person's time perception from eye-tracking data. The approach can profit from individual-based pretraining using only 30 seconds of data. In future work, we aim for robots that respond to human operator needs by automatically classifying physiological data in a closed control loop.
From One to Many: How Active Robot Swarm Sizes Influence Human Cognitive Processes
Mar 20, 2024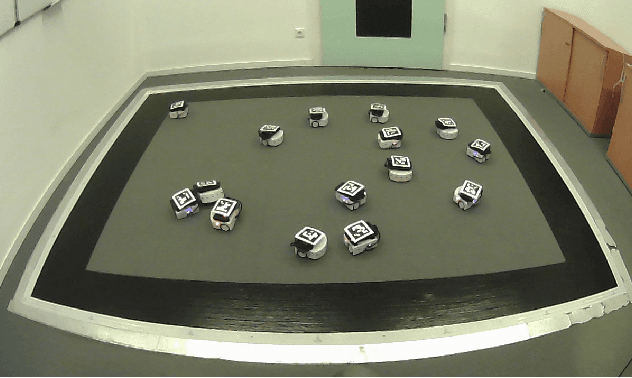
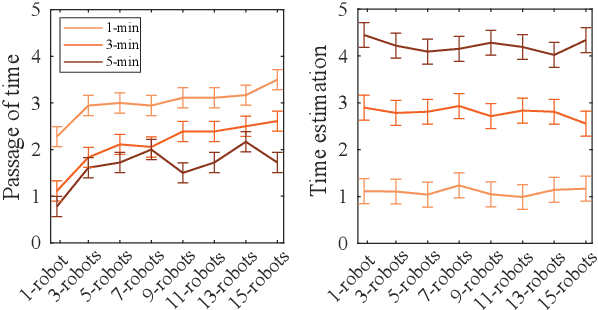
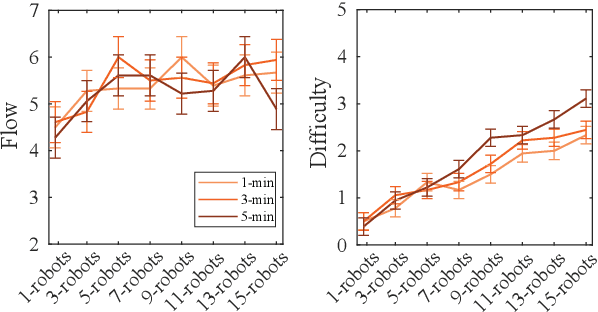
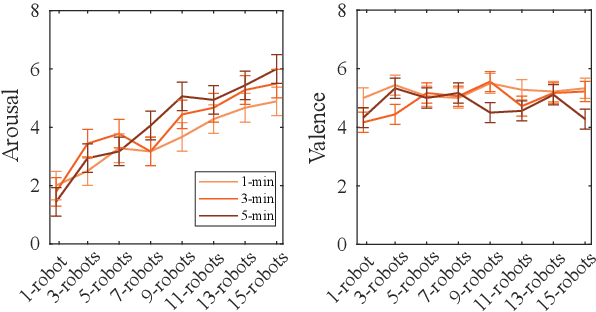
In robotics, understanding human interaction with autonomous systems is crucial for enhancing collaborative technologies. We focus on human-swarm interaction (HSI), exploring how differently sized groups of active robots affect operators' cognitive and perceptual reactions over different durations. We analyze the impact of different numbers of active robots within a 15-robot swarm on operators' time perception, emotional state, flow experience, and task difficulty perception. Our findings indicate that managing multiple active robots when compared to one active robot significantly alters time perception and flow experience, leading to a faster passage of time and increased flow. More active robots and extended durations cause increased emotional arousal and perceived task difficulty, highlighting the interaction between robot the number of active robots and human cognitive processes. These insights inform the creation of intuitive human-swarm interfaces and aid in developing swarm robotic systems aligned with human cognitive structures, enhancing human-robot collaboration.
Emotional Tandem Robots: How Different Robot Behaviors Affect Human Perception While Controlling a Mobile Robot
Mar 06, 2024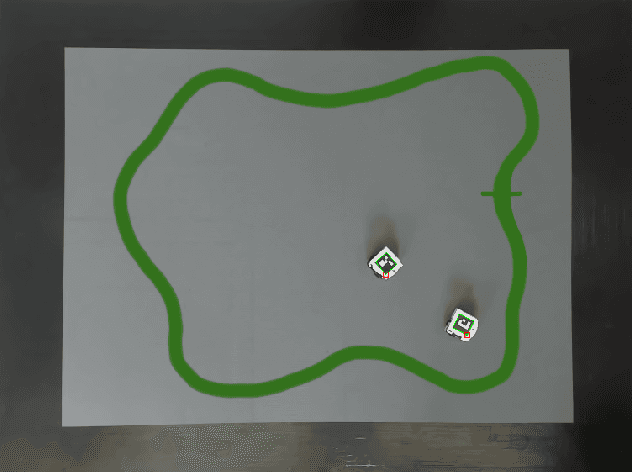
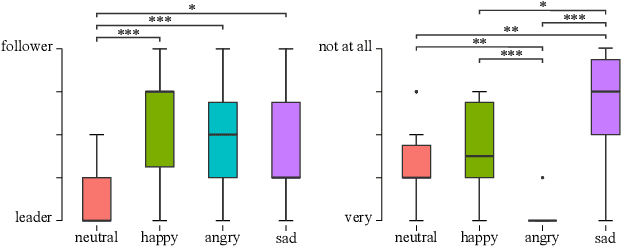
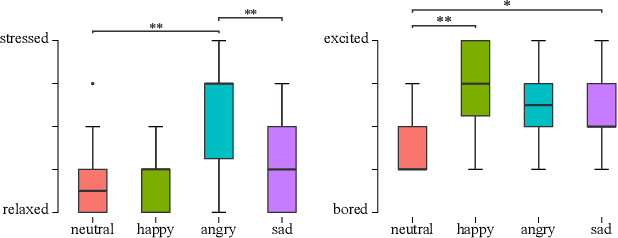
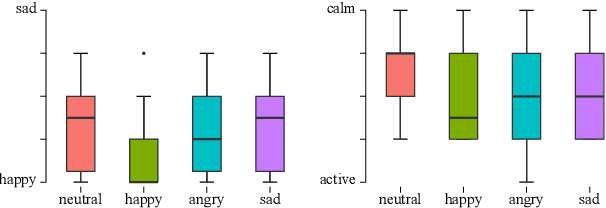
In human-robot interaction (HRI), we study how humans interact with robots, but also the effects of robot behavior on human perception and well-being. Especially, the influence on humans by tandem robots with one human controlled and one autonomous robot or even semi-autonomous multi-robot systems is not yet fully understood. Here, we focus on a leader-follower scenario and study how emotionally expressive motion patterns of a small, mobile follower robot affect the perception of a human operator controlling the leading robot. We examined three distinct emotional behaviors for the follower compared to a neutral condition: angry, happy and sad. We analyzed how participants maneuvered the leader robot along a set path while experiencing each follower behavior in a randomized order. We identified a significant shift in attention toward the follower with emotionally expressive behaviors compared to the neutral condition. For example, the angry behavior significantly heightened participant stress levels and was considered the least preferred behavior. The happy behavior was the most preferred and associated with increased excitement by the participants. Integrating the proposed behaviors in robots can profoundly influence the human operator's attention, emotional state, and overall experience. These insights are valuable for future HRI tandem robot designs.