 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmotional Tandem Robots: How Different Robot Behaviors Affect Human Perception While Controlling a Mobile Robot
Paper and Code
Mar 06, 2024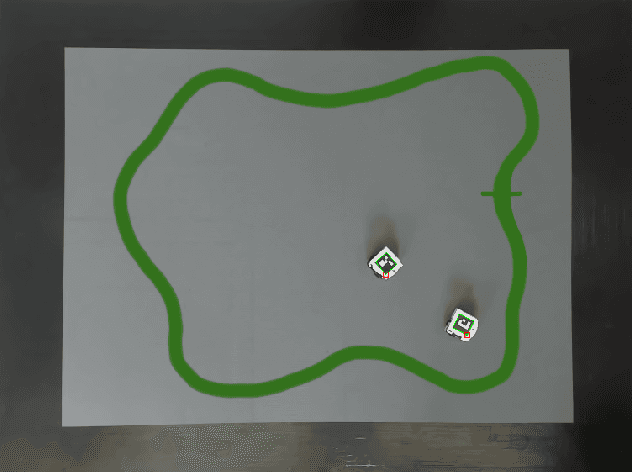
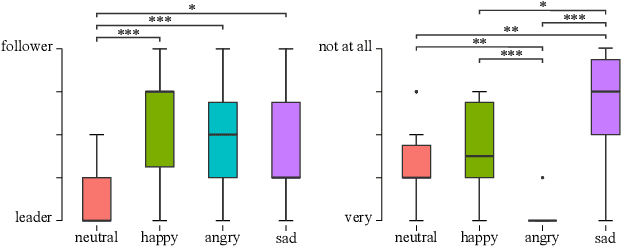
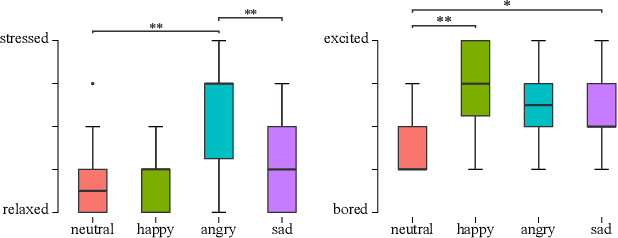
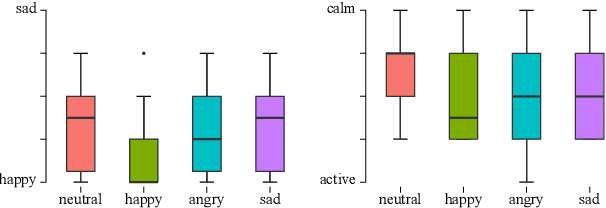
In human-robot interaction (HRI), we study how humans interact with robots, but also the effects of robot behavior on human perception and well-being. Especially, the influence on humans by tandem robots with one human controlled and one autonomous robot or even semi-autonomous multi-robot systems is not yet fully understood. Here, we focus on a leader-follower scenario and study how emotionally expressive motion patterns of a small, mobile follower robot affect the perception of a human operator controlling the leading robot. We examined three distinct emotional behaviors for the follower compared to a neutral condition: angry, happy and sad. We analyzed how participants maneuvered the leader robot along a set path while experiencing each follower behavior in a randomized order. We identified a significant shift in attention toward the follower with emotionally expressive behaviors compared to the neutral condition. For example, the angry behavior significantly heightened participant stress levels and was considered the least preferred behavior. The happy behavior was the most preferred and associated with increased excitement by the participants. Integrating the proposed behaviors in robots can profoundly influence the human operator's attention, emotional state, and overall experience. These insights are valuable for future HRI tandem robot designs.