 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePandaSet: Advanced Sensor Suite Dataset for Autonomous Driving
Dec 23, 2021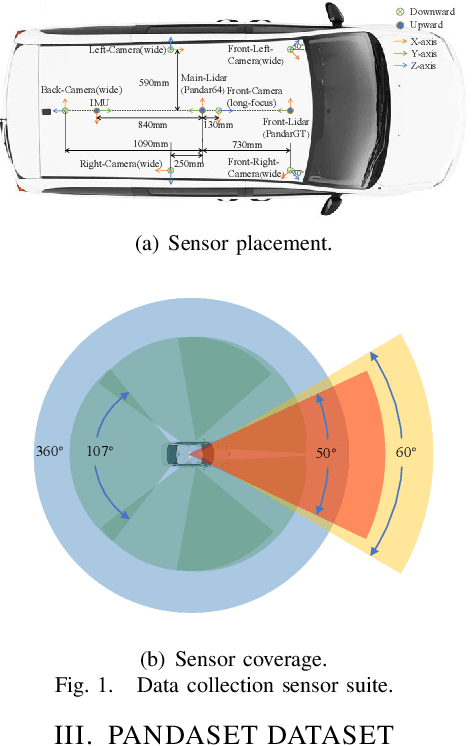
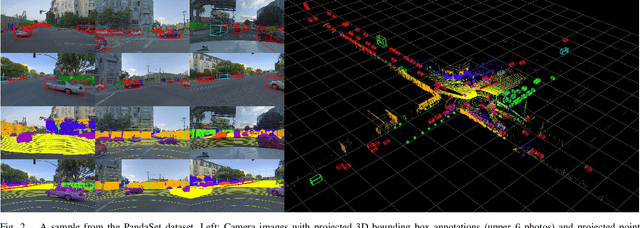

The accelerating development of autonomous driving technology has placed greater demands on obtaining large amounts of high-quality data. Representative, labeled, real world data serves as the fuel for training deep learning networks, critical for improving self-driving perception algorithms. In this paper, we introduce PandaSet, the first dataset produced by a complete, high-precision autonomous vehicle sensor kit with a no-cost commercial license. The dataset was collected using one 360{\deg} mechanical spinning LiDAR, one forward-facing, long-range LiDAR, and 6 cameras. The dataset contains more than 100 scenes, each of which is 8 seconds long, and provides 28 types of labels for object classification and 37 types of labels for semantic segmentation. We provide baselines for LiDAR-only 3D object detection, LiDAR-camera fusion 3D object detection and LiDAR point cloud segmentation. For more details about PandaSet and the development kit, see https://scale.com/open-datasets/pandaset.