 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControlled Gaussian Process Dynamical Models with Application to Robotic Cloth Manipulation
Mar 11, 2021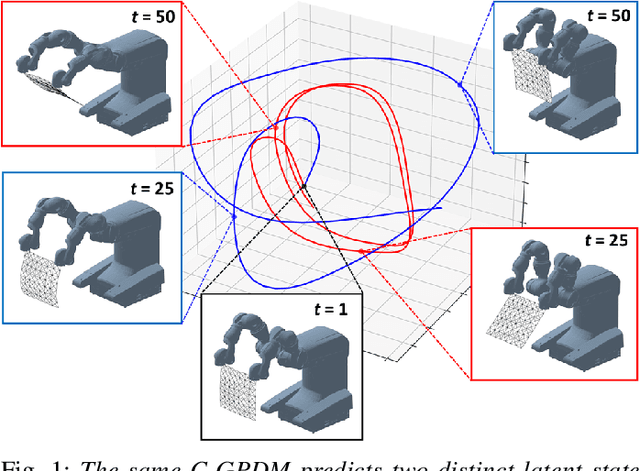
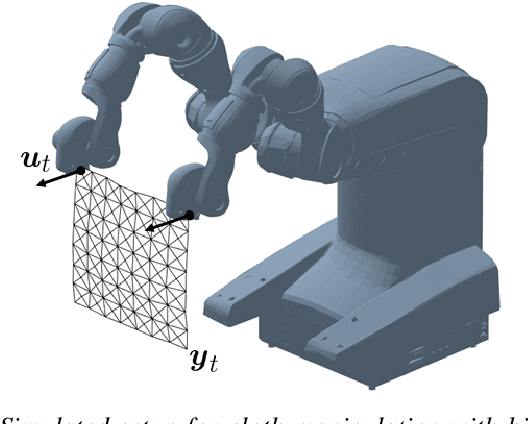

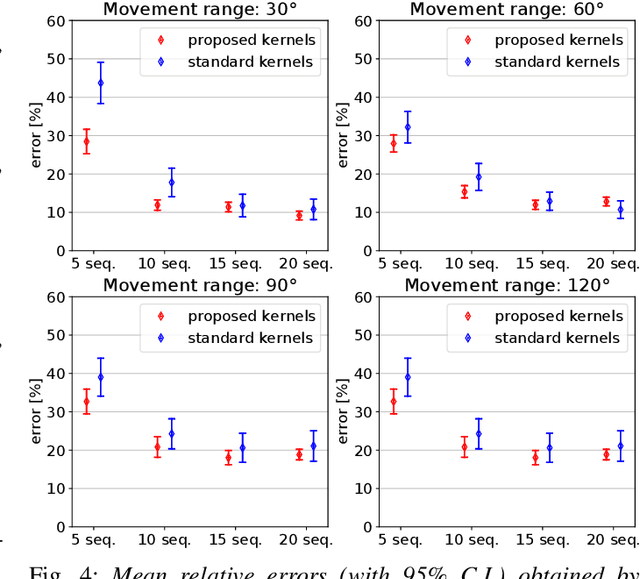
Over the last years, robotic cloth manipulation has gained relevance within the research community. While significant advances have been made in robotic manipulation of rigid objects, the manipulation of non-rigid objects such as cloth garments is still a challenging problem. The uncertainty on how cloth behaves often requires the use of model-based approaches. However, cloth models have a very high dimensionality. Therefore, it is difficult to find a middle point between providing a manipulator with a dynamics model of cloth and working with a state space of tractable dimensionality. For this reason, most cloth manipulation approaches in literature perform static or quasi-static manipulation. In this paper, we propose a variation of Gaussian Process Dynamical Models (GPDMs) to model cloth dynamics in a low-dimensional manifold. GPDMs project a high-dimensional state space into a smaller dimension latent space which is capable of keeping the dynamic properties. Using such approach, we add control variables to the original formulation. In this way, it is possible to take into account the robot commands exerted on the cloth dynamics. We call this new version Controlled Gaussian Process Dynamical Model (C-GPDM). Moreover, we propose an alternative kernel representation for the model, characterized by a richer parameterization than the one employed in the majority of previous GPDM realizations. The modeling capacity of our proposal has been tested in a simulated scenario, where C-GPDM proved to be capable of generalizing over a considerably wide range of movements and correctly predicting the cloth oscillations generated by previously unseen sequences of control actions.