 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocalization Uncertainty Estimation for Anchor-Free Object Detection
Jun 28, 2020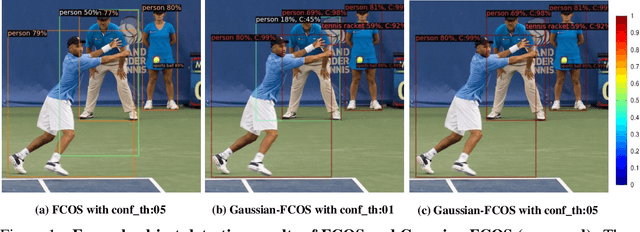

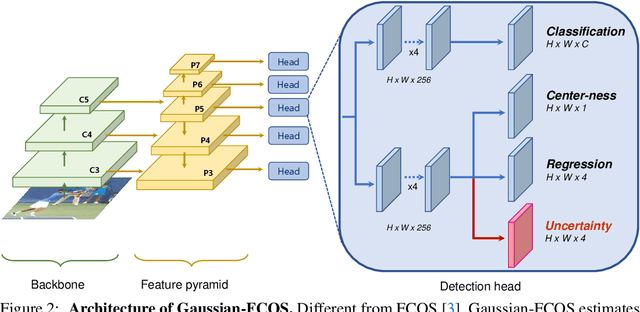
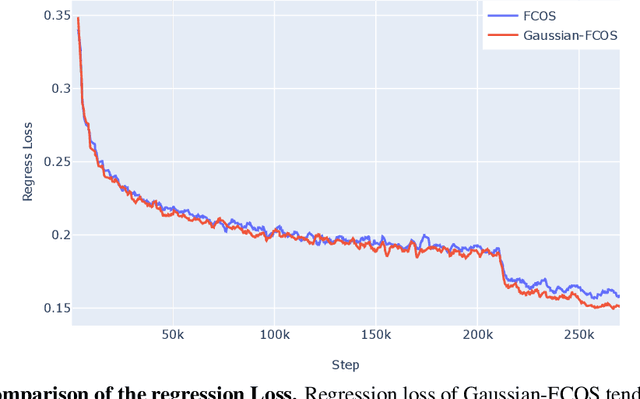
Since many safety-critical systems such as surgical robots and autonomous driving cars are in unstable environments with sensor noise or incomplete data, it is desirable for object detectors to take the confidence of the localization prediction into account. Recent attempts to estimate localization uncertainty for object detection focus only anchor-based method that captures the uncertainty of different characteristics such as location (center point) and scale (width, height). Also, anchor-based methods need to adjust sensitive anchor-box settings. Therefore, we propose a new object detector called Gaussian-FCOS that estimates the localization uncertainty based on an anchor-free detector that captures the uncertainty of similar property with four directions of box offsets (left, right, top, bottom) and avoids the anchor tuning. For this purpose, we design a new loss function, uncertainty loss, to measure how uncertain the estimated object location is by modeling the uncertainty as a Gaussian distribution. Then, the detection score is calibrated through the estimated uncertainty. Experiments on challenging COCO datasets demonstrate that the proposed new loss function not only enables the network to estimate the uncertainty but produces a synergy effect with regression loss. In addition, our Gaussian-FCOS reduces false positives with the estimated localization uncertainty and finds more missing-objects, boosting both Average Precision (AP) and Recall (AR). We hope Gaussian-FCOS serve as a baseline for the reliability-required task.