 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperimental Validation of Linear and Nonlinear MPC on an Articulated Unmanned Ground Vehicle
Mar 25, 2021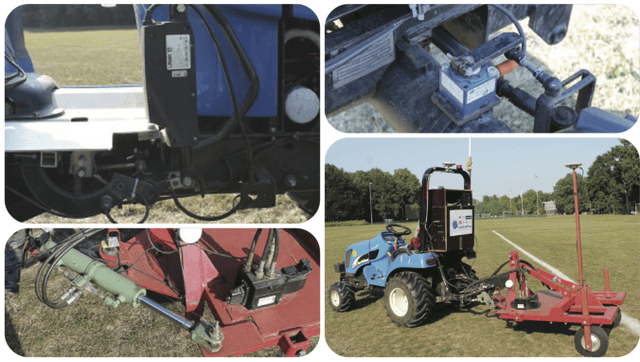
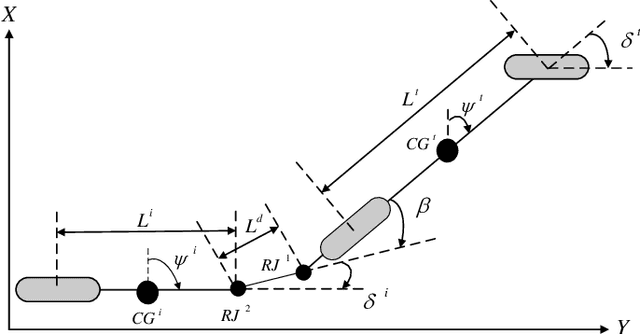
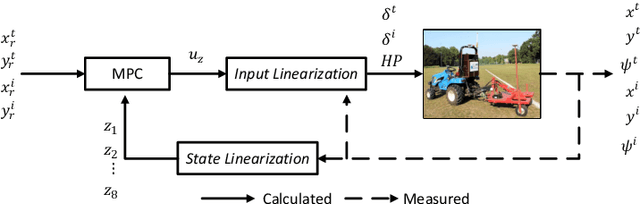
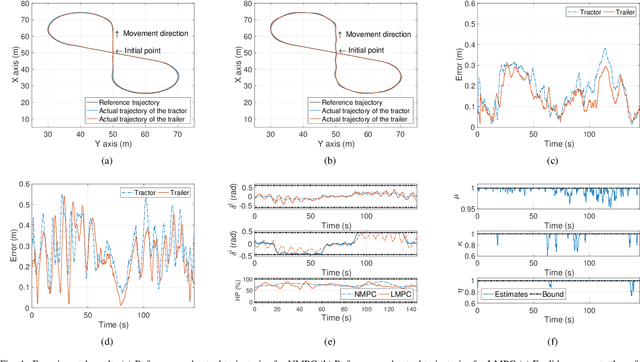
This paper focuses on the trajectory tracking control problem for an articulated unmanned ground vehicle. We propose and compare two approaches in terms of performance and computational complexity. The first uses a nonlinear mathematical model derived from first principles and combines a nonlinear model predictive controller (NMPC) with a nonlinear moving horizon estimator (NMHE) to produce a control strategy. The second is based on an input-state linearization (ISL) of the original model followed by linear model predictive control (LMPC). A fast real-time iteration scheme is proposed, implemented for the NMHE-NMPC framework and benchmarked against the ISL-LMPC framework, which is a traditional and cheap method. The experimental results for a time-based trajectory show that the NMHE-NMPC framework with the proposed real-time iteration scheme gives better trajectory tracking performance than the ISL-LMPC framework and the required computation time is feasible for real-time applications. Moreover, the ISL-LMPC produces results of a quality comparable to the NMHE-NMPC framework at a significantly reduced computational cost.
High Precision Control of Tracked Field Robots in the Presence of Unknown Traction Coefficients
Mar 21, 2021



Accurate steering through crop rows that avoids crop damage is one of the most important tasks for agricultural robots utilized in various field operations, such as monitoring, mechanical weeding, or spraying. In practice, varying soil conditions can result in off-track navigation due to unknown traction coefficients so that it can cause crop damage. To address this problem, this paper presents the development, application, and experimental results of a real-time receding horizon estimation and control (RHEC) framework applied to a fully autonomous mobile robotic platform to increase its steering accuracy. Recent advances in cheap and fast microprocessors, as well as advances in solution methods for nonlinear optimization problems, have made nonlinear receding horizon control (RHC) and receding horizon estimation (RHE) methods suitable for field robots that require high frequency (milliseconds) updates. A real-time RHEC framework is developed and applied to a fully autonomous mobile robotic platform designed by the authors for in-field phenotyping applications in Sorghum fields. Nonlinear RHE is used to estimate constrained states and parameters, and nonlinear RHC is designed based on an adaptive system model which contains time-varying parameters. The capabilities of the real-time RHEC framework are verified experimentally, and the results show an accurate tracking performance on a bumpy and wet soil field. The mean values of the Euclidean error and required computation time of the RHEC framework are respectively equal to $0.0423$ m and $0.88$ milliseconds.