 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Convex Optimization with Binary Constraints
May 05, 2020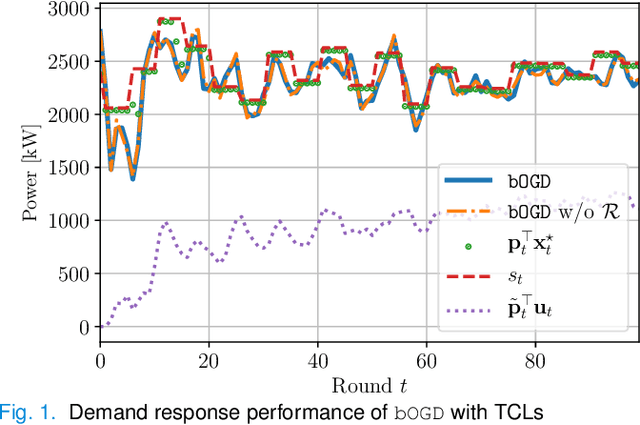


We consider online optimization with binary decision variables and convex loss functions. We design a new algorithm, binary online gradient descent (bOG}), and bound its expected dynamic regret. The bound is sublinear in time and linear in the cumulative variation of the relaxed, continuous round optima. We apply bOGD to demand response with thermostatically controlled loads, in which binary constraints model discrete on/off settings. We also model uncertainty and varying load availability, which depend on temperature deadbands, lock-out of cooling units and manual overrides. We test the performance of bOGD in several simulations based on demand response.
Predictive Online Convex Optimization
May 15, 2019
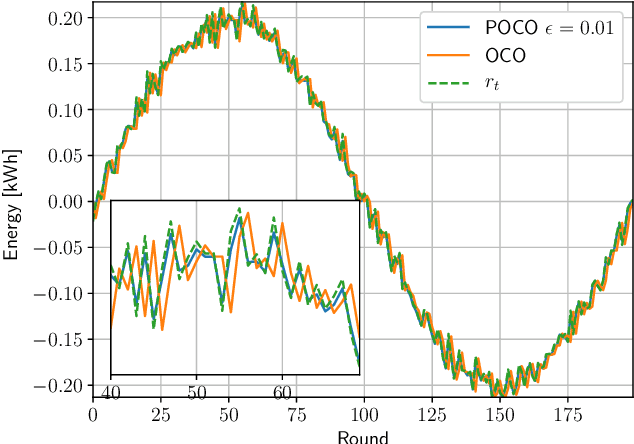

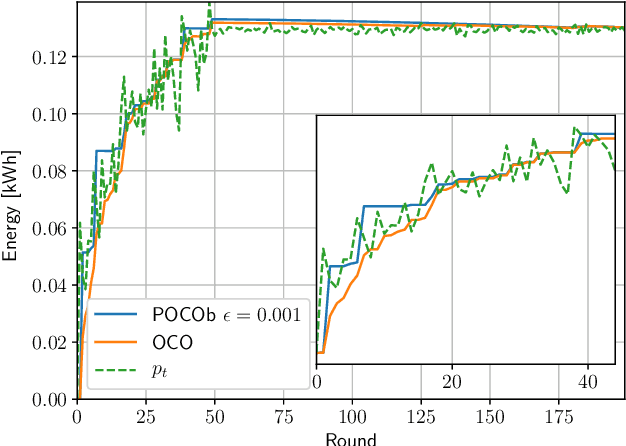
We incorporate future information in the form of the estimated value of future gradients in online convex optimization. This is motivated by demand response in power systems, where forecasts about the current round, e.g., the weather or the loads' behavior, can be used to improve on predictions made with only past observations. Specifically, we introduce an additional predictive step that follows the standard online convex optimization step when certain conditions on the estimated gradient and descent direction are met. We show that under these conditions and without any assumptions on the predictability of the environment, the predictive update strictly improves on the performance of the standard update. We give two types of predictive update for various family of loss functions. We provide a regret bound for each of our predictive online convex optimization algorithms. Finally, we apply our framework to an example based on demand response which demonstrates its superior performance to a standard online convex optimization algorithm.
Setpoint Tracking with Partially Observed Loads
Sep 19, 2017



We use online convex optimization (OCO) for setpoint tracking with uncertain, flexible loads. We consider full feedback from the loads, bandit feedback, and two intermediate types of feedback: partial bandit where a subset of the loads are individually observed and the rest are observed in aggregate, and Bernoulli feedback where in each round the aggregator receives either full or bandit feedback according to a known probability. We give sublinear regret bounds in all cases. We numerically evaluate our algorithms on examples with thermostatically controlled loads and electric vehicles.