 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLaMandement: Large Language Models for Summarization of French Legislative Proposals
Jan 29, 2024This report introduces LLaMandement, a state-of-the-art Large Language Model, fine-tuned by the French government and designed to enhance the efficiency and efficacy of processing parliamentary sessions (including the production of bench memoranda and documents required for interministerial meetings) by generating neutral summaries of legislative proposals. Addressing the administrative challenges of manually processing a growing volume of legislative amendments, LLaMandement stands as a significant legal technological milestone, providing a solution that exceeds the scalability of traditional human efforts while matching the robustness of a specialized legal drafter. We release all our fine-tuned models and training data to the community.
Assessing Cross-dataset Generalization of Pedestrian Crossing Predictors
Jan 29, 2022
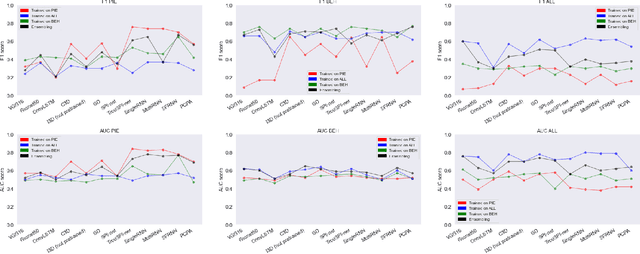
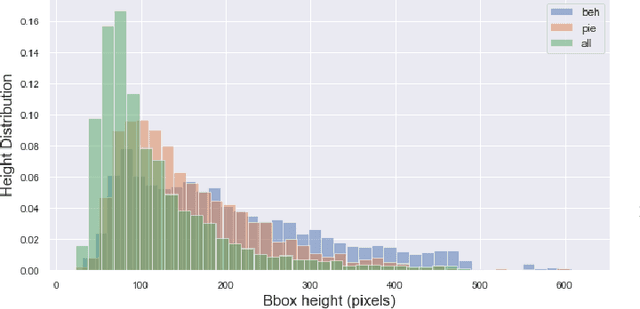
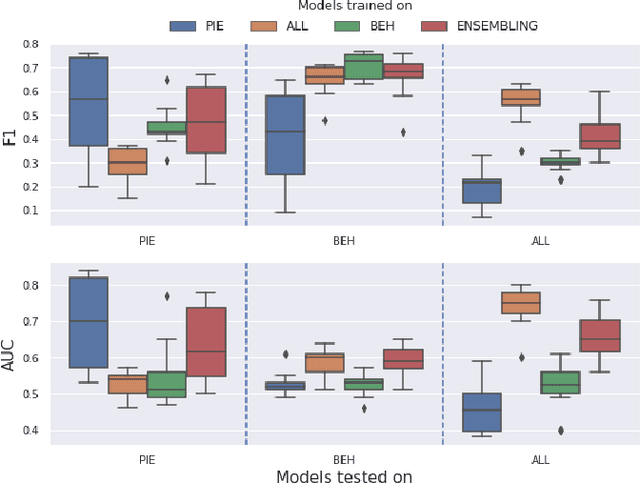
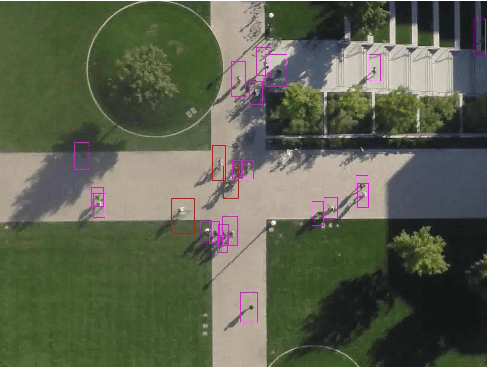
Pedestrian crossing prediction has been a topic of active research, resulting in many new algorithmic solutions. While measuring the overall progress of those solutions over time tends to be more and more established due to the new publicly available benchmark and standardized evaluation procedures, knowing how well existing predictors react to unseen data remains an unanswered question. This evaluation is imperative as serviceable crossing behavior predictors should be set to work in various scenarii without compromising pedestrian safety due to misprediction. To this end, we conduct a study based on direct cross-dataset evaluation. Our experiments show that current state-of-the-art pedestrian behavior predictors generalize poorly in cross-dataset evaluation scenarii, regardless of their robustness during a direct training-test set evaluation setting. In the light of what we observe, we argue that the future of pedestrian crossing prediction, e.g. reliable and generalizable implementations, should not be about tailoring models, trained with very little available data, and tested in a classical train-test scenario with the will to infer anything about their behavior in real life. It should be about evaluating models in a cross-dataset setting while considering their uncertainty estimates under domain shift.
TrouSPI-Net: Spatio-temporal attention on parallel atrous convolutions and U-GRUs for skeletal pedestrian crossing prediction
Sep 07, 2021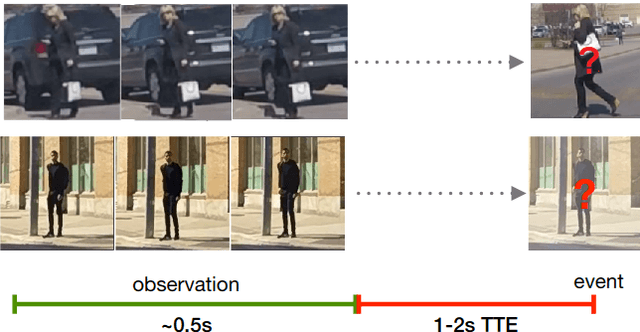
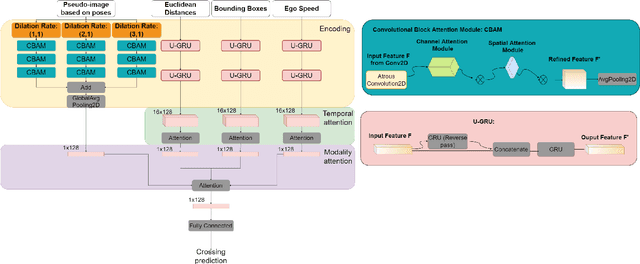
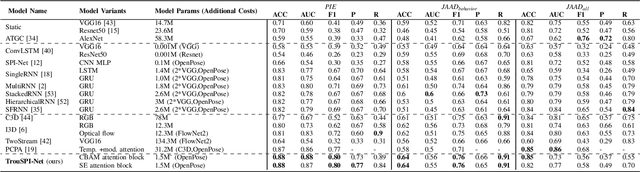
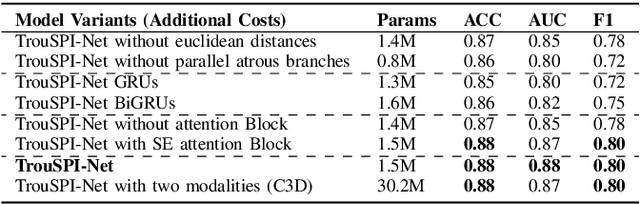
Understanding the behaviors and intentions of pedestrians is still one of the main challenges for vehicle autonomy, as accurate predictions of their intentions can guarantee their safety and driving comfort of vehicles. In this paper, we address pedestrian crossing prediction in urban traffic environments by linking the dynamics of a pedestrian's skeleton to a binary crossing intention. We introduce TrouSPI-Net: a context-free, lightweight, multi-branch predictor. TrouSPI-Net extracts spatio-temporal features for different time resolutions by encoding pseudo-images sequences of skeletal joints' positions and processes them with parallel attention modules and atrous convolutions. The proposed approach is then enhanced by processing features such as relative distances of skeletal joints, bounding box positions, or ego-vehicle speed with U-GRUs. Using the newly proposed evaluation procedures for two large public naturalistic data sets for studying pedestrian behavior in traffic: JAAD and PIE, we evaluate TrouSPI-Net and analyze its performance. Experimental results show that TrouSPI-Net achieved 0.76 F1 score on JAAD and 0.80 F1 score on PIE, therefore outperforming current state-of-the-art while being lightweight and context-free.
Asymmetrical Bi-RNN for pedestrian trajectory encoding
Jun 19, 2021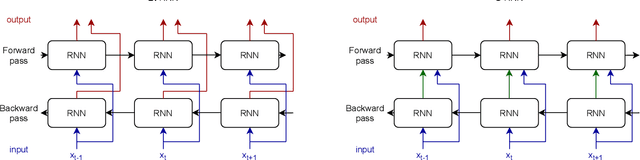

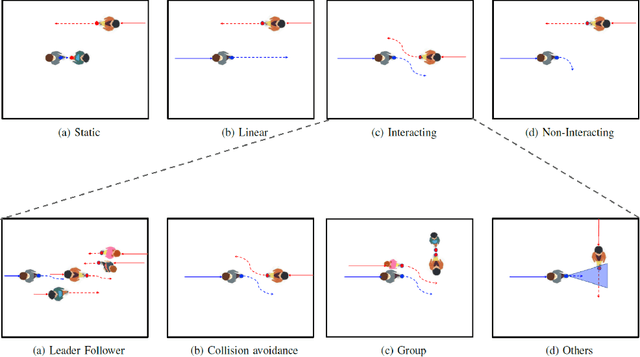
Pedestrian motion behavior involves a combination of individual goals and social interactions with other agents. In this article, we present an asymmetrical bidirectional recurrent neural network architecture called U-RNN to encode pedestrian trajectories and evaluate its relevance to replace LSTMs for various forecasting models. Experimental results on the Trajnet++ benchmark show that the U-LSTM variant yields better results regarding every available metrics (ADE, FDE, Collision rate) than common trajectory encoders for a variety of approaches and interaction modules, suggesting that the proposed approach is a viable alternative to the de facto sequence encoding RNNs. Our implementation of the asymmetrical Bi-RNNs for the Trajnet++ benchmark is available at: github.com/JosephGesnouin/Asymmetrical-Bi-RNNs-to-encode-pedestrian-trajectories