 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAsymmetrical Bi-RNN for pedestrian trajectory encoding
Paper and Code
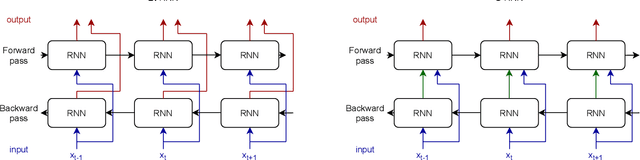
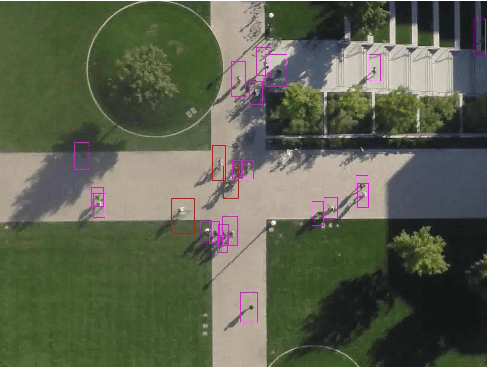

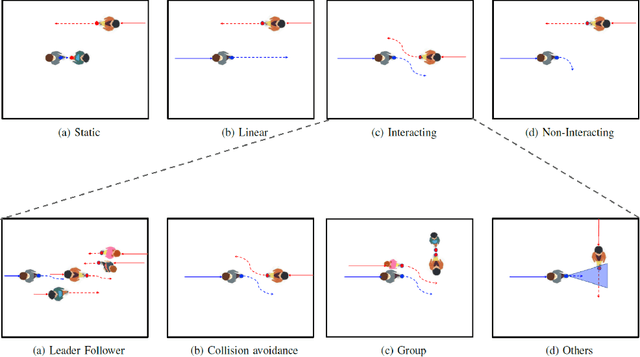
Pedestrian motion behavior involves a combination of individual goals and social interactions with other agents. In this article, we present an asymmetrical bidirectional recurrent neural network architecture called U-RNN to encode pedestrian trajectories and evaluate its relevance to replace LSTMs for various forecasting models. Experimental results on the Trajnet++ benchmark show that the U-LSTM variant yields better results regarding every available metrics (ADE, FDE, Collision rate) than common trajectory encoders for a variety of approaches and interaction modules, suggesting that the proposed approach is a viable alternative to the de facto sequence encoding RNNs. Our implementation of the asymmetrical Bi-RNNs for the Trajnet++ benchmark is available at: github.com/JosephGesnouin/Asymmetrical-Bi-RNNs-to-encode-pedestrian-trajectories