Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClustering Learning for Robotic Vision
Mar 13, 2013
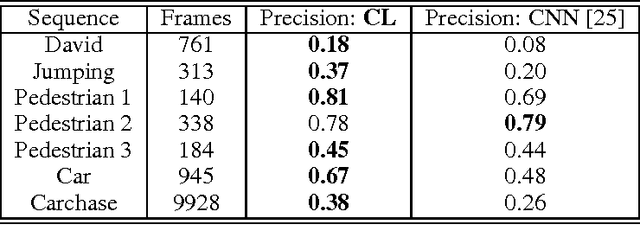
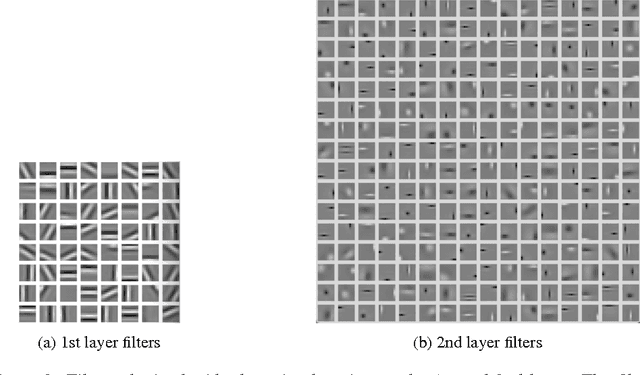
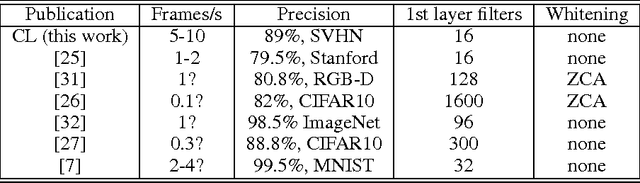
We present the clustering learning technique applied to multi-layer feedforward deep neural networks. We show that this unsupervised learning technique can compute network filters with only a few minutes and a much reduced set of parameters. The goal of this paper is to promote the technique for general-purpose robotic vision systems. We report its use in static image datasets and object tracking datasets. We show that networks trained with clustering learning can outperform large networks trained for many hours on complex datasets.
* Code for this paper is available here:
https://github.com/culurciello/CL_paper1_code
Via