 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Twinning for Hybrid Control of Flapping-Wing Drones
May 21, 2025Controlling the flight of flapping-wing drones requires versatile controllers that handle their time-varying, nonlinear, and underactuated dynamics from incomplete and noisy sensor data. Model-based methods struggle with accurate modeling, while model-free approaches falter in efficiently navigating very high-dimensional and nonlinear control objective landscapes. This article presents a novel hybrid model-free/model-based approach to flight control based on the recently proposed reinforcement twinning algorithm. The model-based (MB) approach relies on an adjoint formulation using an adaptive digital twin, continuously identified from live trajectories, while the model-free (MF) approach relies on reinforcement learning. The two agents collaborate through transfer learning, imitation learning, and experience sharing using the real environment, the digital twin and a referee. The latter selects the best agent to interact with the real environment based on performance within the digital twin and a real-to-virtual environment consistency ratio. The algorithm is evaluated for controlling the longitudinal dynamics of a flapping-wing drone, with the environment simulated as a nonlinear, time-varying dynamical system under the influence of quasi-steady aerodynamic forces. The hybrid control learning approach is tested with three types of initialization of the adaptive model: (1) offline identification using previously available data, (2) random initialization with full online identification, and (3) offline pre-training with an estimation bias, followed by online adaptation. In all three scenarios, the proposed hybrid learning approach demonstrates superior performance compared to purely model-free and model-based methods.
Introducing DAIMYO: a first-time-right dynamic design architecture and its application to tail-sitter UAS development
Sep 15, 2024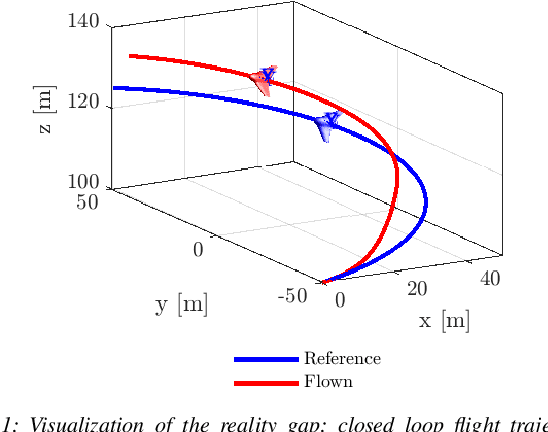
In recent years, there has been a notable evolution in various multidisciplinary design methodologies for dynamic systems. Among these approaches, a noteworthy concept is that of concurrent conceptual and control design or co-design. This approach involves the tuning of feedforward and/or feedback control strategies in conjunction with the conceptual design of the dynamic system. The primary aim is to discover integrated solutions that surpass those attainable through a disjointed or decoupled approach. This concurrent design paradigm exhibits particular promise in the context of hybrid unmanned aerial systems (UASs), such as tail-sitters, where the objectives of versatility (driven by control considerations) and efficiency (influenced by conceptual design) often present conflicting demands. Nevertheless, a persistent challenge lies in the potential disparity between the theoretical models that underpin the design process and the real-world operational environment, the so-called reality gap. Such disparities can lead to suboptimal performance when the designed system is deployed in reality. To address this issue, this paper introduces DAIMYO, a novel design architecture that incorporates a high-fidelity environment, which emulates real-world conditions, into the procedure in pursuit of a `first-time-right' design. The outcome of this innovative approach is a design procedure that yields versatile and efficient UAS designs capable of withstanding the challenges posed by the reality gap.