 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAttacking the Loop: Adversarial Attacks on Graph-based Loop Closure Detection
Dec 12, 2023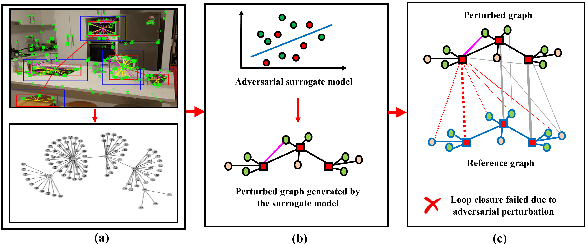
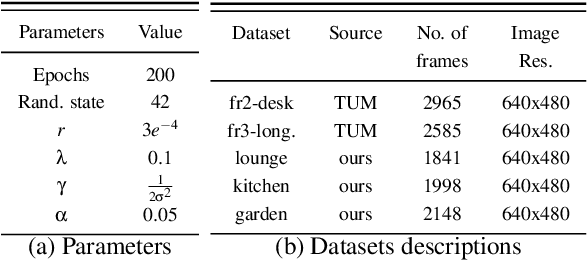
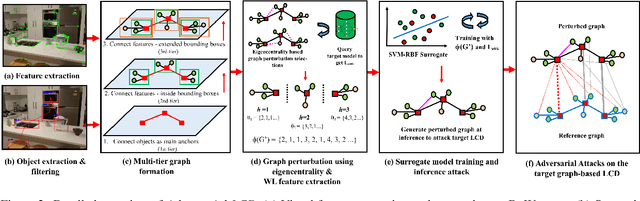
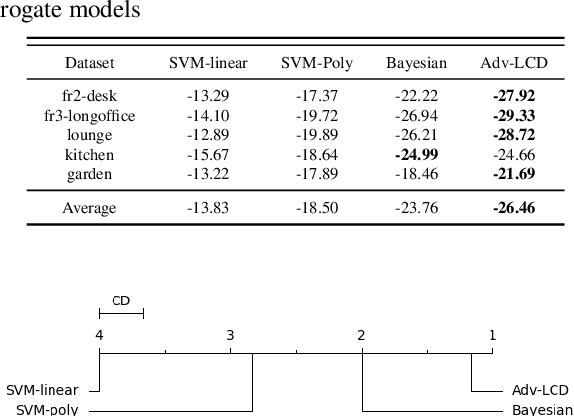
With the advancement in robotics, it is becoming increasingly common for large factories and warehouses to incorporate visual SLAM (vSLAM) enabled automated robots that operate closely next to humans. This makes any adversarial attacks on vSLAM components potentially detrimental to humans working alongside them. Loop Closure Detection (LCD) is a crucial component in vSLAM that minimizes the accumulation of drift in mapping, since even a small drift can accumulate into a significant drift over time. A prior work by Kim et al., SymbioLCD2, unified visual features and semantic objects into a single graph structure for finding loop closure candidates. While this provided a performance improvement over visual feature-based LCD, it also created a single point of vulnerability for potential graph-based adversarial attacks. Unlike previously reported visual-patch based attacks, small graph perturbations are far more challenging to detect, making them a more significant threat. In this paper, we present Adversarial-LCD, a novel black-box evasion attack framework that employs an eigencentrality-based perturbation method and an SVM-RBF surrogate model with a Weisfeiler-Lehman feature extractor for attacking graph-based LCD. Our evaluation shows that the attack performance of Adversarial-LCD with the SVM-RBF surrogate model was superior to that of other machine learning surrogate algorithms, including SVM-linear, SVM-polynomial, and Bayesian classifier, demonstrating the effectiveness of our attack framework. Furthermore, we show that our eigencentrality-based perturbation method outperforms other algorithms, such as Random-walk and Shortest-path, highlighting the efficiency of Adversarial-LCD's perturbation selection method.
Closing the Loop: Graph Networks to Unify Semantic Objects and Visual Features for Multi-object Scenes
Sep 24, 2022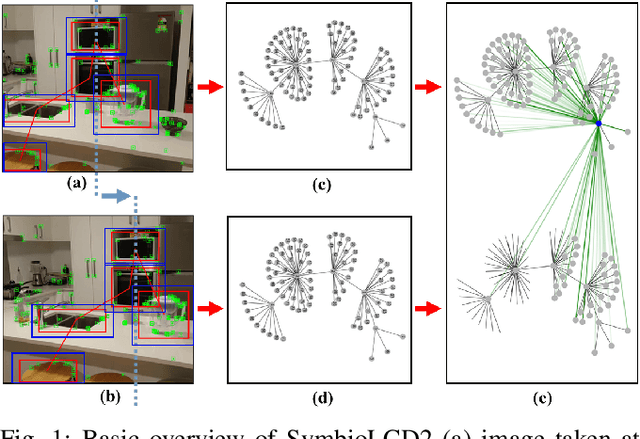
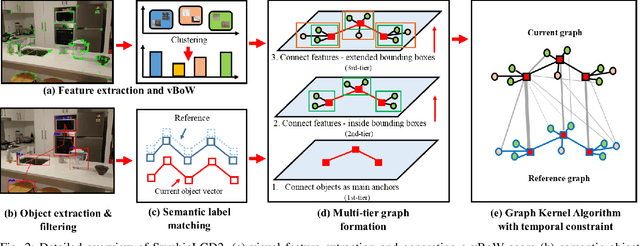
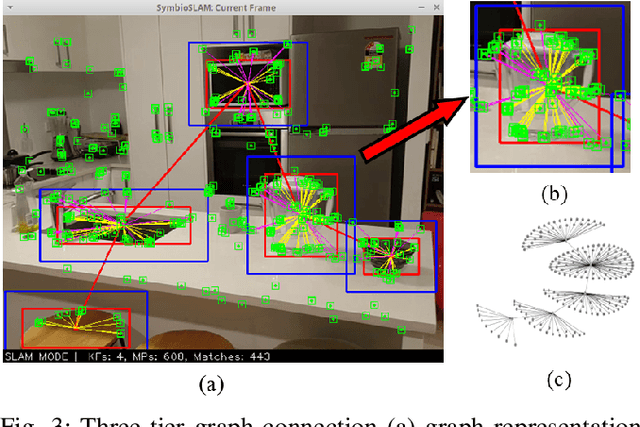

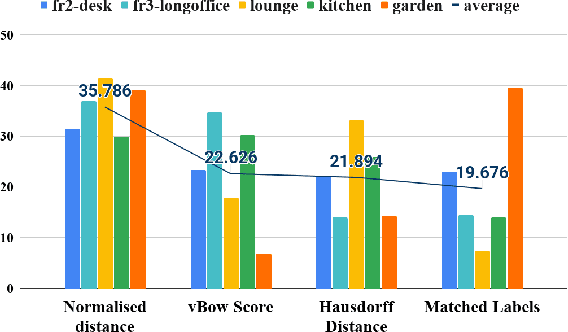
In Simultaneous Localization and Mapping (SLAM), Loop Closure Detection (LCD) is essential to minimize drift when recognizing previously visited places. Visual Bag-of-Words (vBoW) has been an LCD algorithm of choice for many state-of-the-art SLAM systems. It uses a set of visual features to provide robust place recognition but fails to perceive the semantics or spatial relationship between feature points. Previous work has mainly focused on addressing these issues by combining vBoW with semantic and spatial information from objects in the scene. However, they are unable to exploit spatial information of local visual features and lack a structure that unifies semantic objects and visual features, therefore limiting the symbiosis between the two components. This paper proposes SymbioLCD2, which creates a unified graph structure to integrate semantic objects and visual features symbiotically. Our novel graph-based LCD system utilizes the unified graph structure by applying a Weisfeiler-Lehman graph kernel with temporal constraints to robustly predict loop closure candidates. Evaluation of the proposed system shows that having a unified graph structure incorporating semantic objects and visual features improves LCD prediction accuracy, illustrating that the proposed graph structure provides a strong symbiosis between these two complementary components. It also outperforms other Machine Learning algorithms - such as SVM, Decision Tree, Random Forest, Neural Network and GNN based Graph Matching Networks. Furthermore, it has shown good performance in detecting loop closure candidates earlier than state-of-the-art SLAM systems, demonstrating that extended semantic and spatial awareness from the unified graph structure significantly impacts LCD performance.
SymbioLCD: Ensemble-Based Loop Closure Detection using CNN-Extracted Objects and Visual Bag-of-Words
Oct 21, 2021

Loop closure detection is an essential tool of Simultaneous Localization and Mapping (SLAM) to minimize drift in its localization. Many state-of-the-art loop closure detection (LCD) algorithms use visual Bag-of-Words (vBoW), which is robust against partial occlusions in a scene but cannot perceive the semantics or spatial relationships between feature points. CNN object extraction can address those issues, by providing semantic labels and spatial relationships between objects in a scene. Previous work has mainly focused on replacing vBoW with CNN-derived features. In this paper, we propose SymbioLCD, a novel ensemble-based LCD that utilizes both CNN-extracted objects and vBoW features for LCD candidate prediction. When used in tandem, the added elements of object semantics and spatial-awareness create a more robust and symbiotic loop closure detection system. The proposed SymbioLCD uses scale-invariant spatial and semantic matching, Hausdorff distance with temporal constraints, and a Random Forest that utilizes combined information from both CNN-extracted objects and vBoW features for predicting accurate loop closure candidates. Evaluation of the proposed method shows it outperforms other Machine Learning (ML) algorithms - such as SVM, Decision Tree and Neural Network, and demonstrates that there is a strong symbiosis between CNN-extracted object information and vBoW features which assists accurate LCD candidate prediction. Furthermore, it is able to perceive loop closure candidates earlier than state-of-the-art SLAM algorithms, utilizing added spatial and semantic information from CNN-extracted objects.