 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClosing the Loop: Graph Networks to Unify Semantic Objects and Visual Features for Multi-object Scenes
Paper and Code
Sep 24, 2022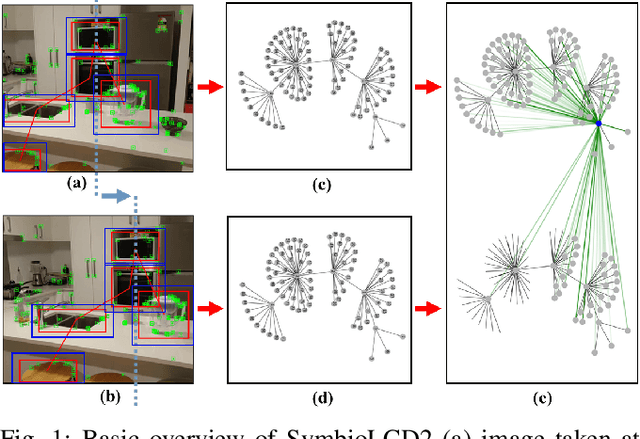
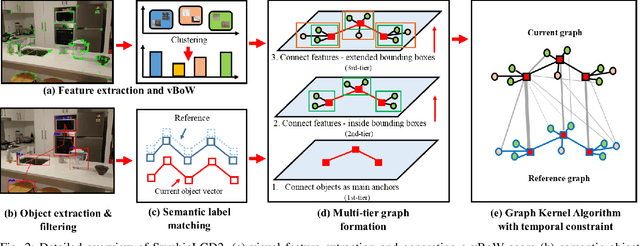
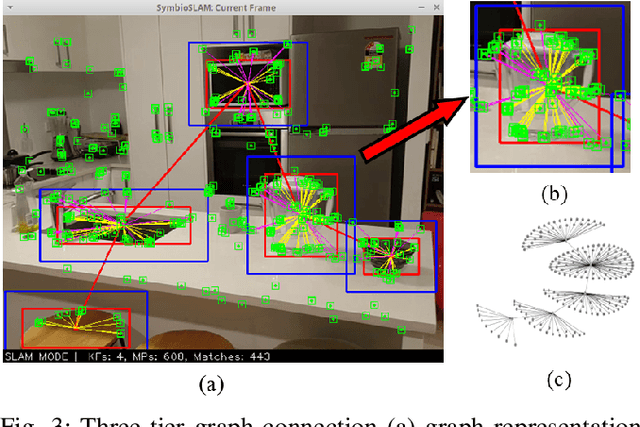

In Simultaneous Localization and Mapping (SLAM), Loop Closure Detection (LCD) is essential to minimize drift when recognizing previously visited places. Visual Bag-of-Words (vBoW) has been an LCD algorithm of choice for many state-of-the-art SLAM systems. It uses a set of visual features to provide robust place recognition but fails to perceive the semantics or spatial relationship between feature points. Previous work has mainly focused on addressing these issues by combining vBoW with semantic and spatial information from objects in the scene. However, they are unable to exploit spatial information of local visual features and lack a structure that unifies semantic objects and visual features, therefore limiting the symbiosis between the two components. This paper proposes SymbioLCD2, which creates a unified graph structure to integrate semantic objects and visual features symbiotically. Our novel graph-based LCD system utilizes the unified graph structure by applying a Weisfeiler-Lehman graph kernel with temporal constraints to robustly predict loop closure candidates. Evaluation of the proposed system shows that having a unified graph structure incorporating semantic objects and visual features improves LCD prediction accuracy, illustrating that the proposed graph structure provides a strong symbiosis between these two complementary components. It also outperforms other Machine Learning algorithms - such as SVM, Decision Tree, Random Forest, Neural Network and GNN based Graph Matching Networks. Furthermore, it has shown good performance in detecting loop closure candidates earlier than state-of-the-art SLAM systems, demonstrating that extended semantic and spatial awareness from the unified graph structure significantly impacts LCD performance.