 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Supervised Monocular Depth Estimation: Solving the Dynamic Object Problem by Semantic Guidance
Jul 21, 2020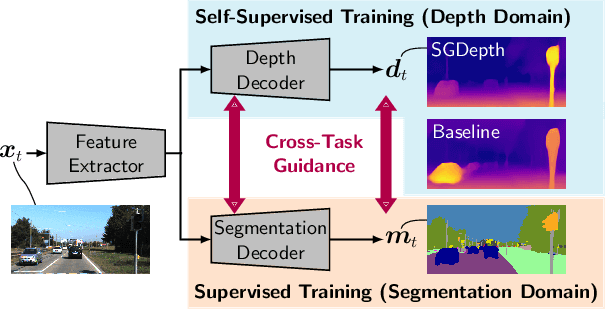

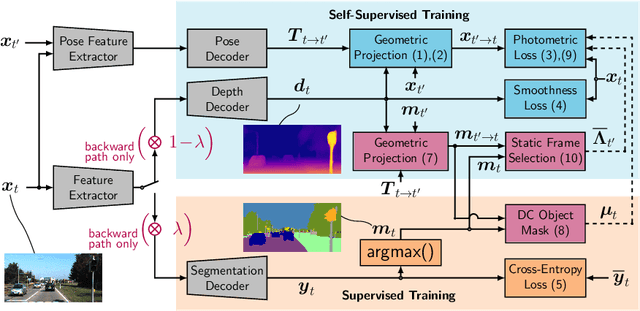
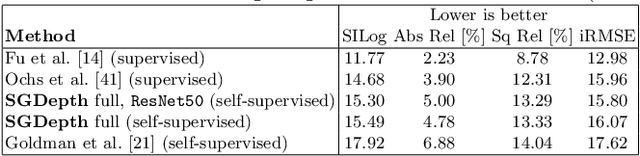
Self-supervised monocular depth estimation presents a powerful method to obtain 3D scene information from single camera images, which is trainable on arbitrary image sequences without requiring depth labels, e.g., from a LiDAR sensor. In this work we present a new self-supervised semantically-guided depth estimation (SGDepth) method to deal with moving dynamic-class (DC) objects, such as moving cars and pedestrians, which violate the static-world assumptions typically made during training of such models. Specifically, we propose (i) mutually beneficial cross-domain training of (supervised) semantic segmentation and self-supervised depth estimation with task-specific network heads, (ii) a semantic masking scheme providing guidance to prevent moving DC objects from contaminating the photometric loss, and (iii) a detection method for frames with non-moving DC objects, from which the depth of DC objects can be learned. We demonstrate the performance of our method on several benchmarks, in particular on the Eigen split, where we exceed all baselines without test-time refinement.