 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving the Efficiency of Gradient Descent Algorithms Applied to Optimization Problems with Dynamical Constraints
Aug 26, 2022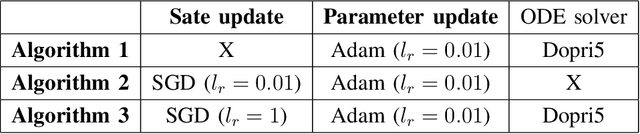
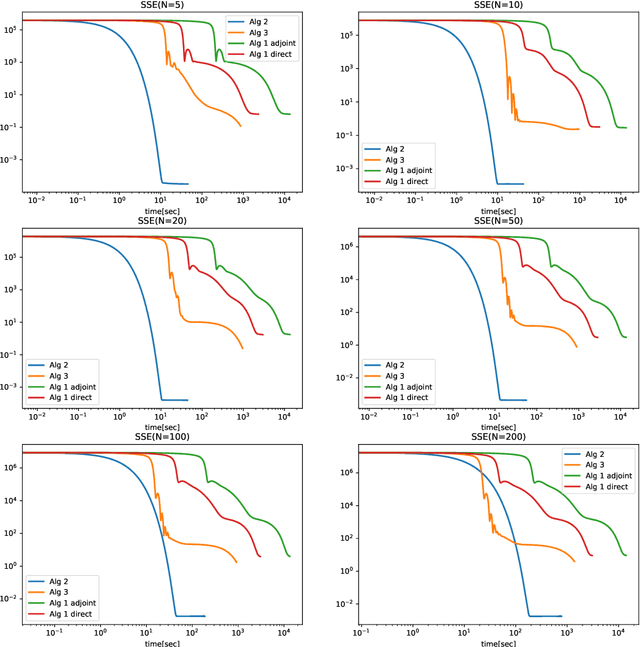

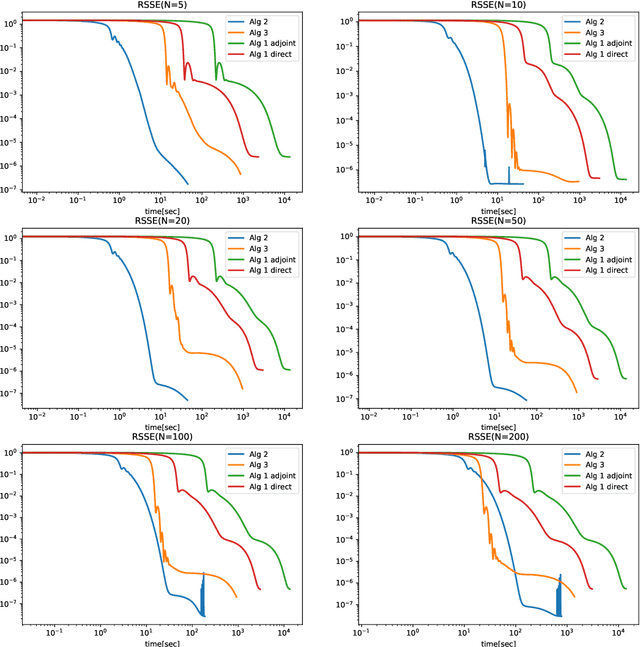
We introduce two block coordinate descent algorithms for solving optimization problems with ordinary differential equations (ODEs) as dynamical constraints. The algorithms do not need to implement direct or adjoint sensitivity analysis methods to evaluate loss function gradients. They results from reformulation of the original problem as an equivalent optimization problem with equality constraints. The algorithms naturally follow from steps aimed at recovering the gradient-decent algorithm based on ODE solvers that explicitly account for sensitivity of the ODE solution. In our first proposed algorithm we avoid explicitly solving the ODE by integrating the ODE solver as a sequence of implicit constraints. In our second algorithm, we use an ODE solver to reset the ODE solution, but no direct are adjoint sensitivity analysis methods are used. Both algorithm accepts mini-batch implementations and show significant efficiency benefits from GPU-based parallelization. We demonstrate the performance of the algorithms when applied to learning the parameters of the Cucker-Smale model. The algorithms are compared with gradient descent algorithms based on ODE solvers endowed with sensitivity analysis capabilities, for various number of state size, using Pytorch and Jax implementations. The experimental results demonstrate that the proposed algorithms are at least 4x faster than the Pytorch implementations, and at least 16x faster than Jax implementations. For large versions of the Cucker-Smale model, the Jax implementation is thousands of times faster than the sensitivity analysis-based implementation. In addition, our algorithms generate more accurate results both on training and test data. Such gains in computational efficiency is paramount for algorithms that implement real time parameter estimations, such as diagnosis algorithms.
Characterizing an Analogical Concept Memory for Newellian Cognitive Architectures
Jun 19, 2020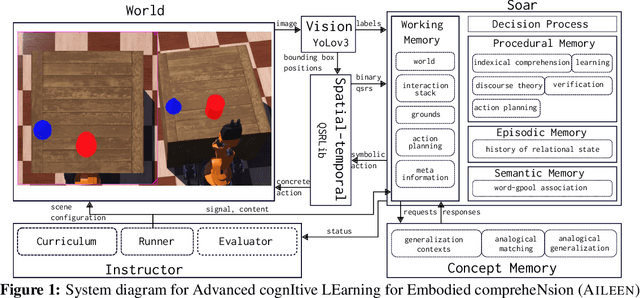
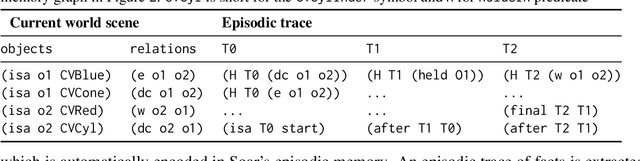
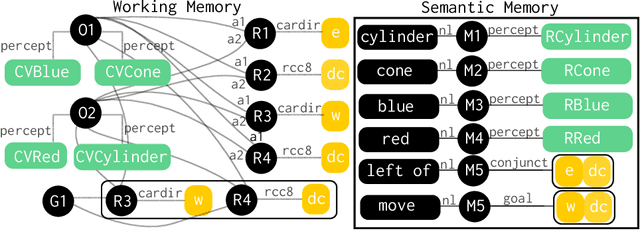
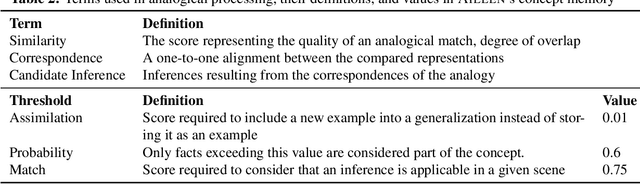
We propose a new long-term declarative memory for Soar that leverages the computational models of analogical reasoning and generalization. We situate our research in interactive task learning (ITL) and embodied language processing (ELP). We demonstrate that the learning methods implemented in the proposed memory can quickly learn a diverse types of novel concepts that are useful in task execution. Our approach has been instantiated in an implemented hybrid AI system AILEEN and evaluated on a simulated robotic domain.