Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCharacterizing an Analogical Concept Memory for Newellian Cognitive Architectures
Jun 19, 2020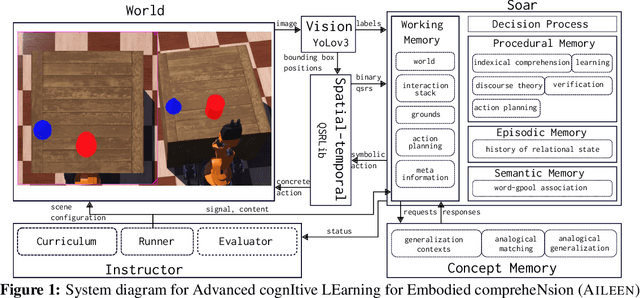
We propose a new long-term declarative memory for Soar that leverages the computational models of analogical reasoning and generalization. We situate our research in interactive task learning (ITL) and embodied language processing (ELP). We demonstrate that the learning methods implemented in the proposed memory can quickly learn a diverse types of novel concepts that are useful in task execution. Our approach has been instantiated in an implemented hybrid AI system AILEEN and evaluated on a simulated robotic domain.
* Under review at the Eighth Annual Conference on Advances in Cognitive
Systems (ACS 2020)
Via