 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFusion of heterogeneous bands and kernels in hyperspectral image processing
May 22, 2019Hyperspectral imaging is a powerful technology that is plagued by large dimensionality. Herein, we explore a way to combat that hindrance via non-contiguous and contiguous (simpler to realize sensor) band grouping for dimensionality reduction. Our approach is different in the respect that it is flexible and it follows a well-studied process of visual clustering in high-dimensional spaces. Specifically, we extend the improved visual assessment of cluster tendency and clustering in ordered dissimilarity data unsupervised clustering algorithms for supervised hyperspectral learning. In addition, we propose a way to extract diverse features via the use of different proximity metrics (ways to measure the similarity between bands) and kernel functions. The discovered features are fused with $l_{\infty}$-norm multiple kernel learning. Experiments are conducted on two benchmark datasets and our results are compared to related work. These datasets indicate that contiguous or not is application specific, but heterogeneous features and kernels usually lead to performance gain.
Deep Learning Hyperspectral Image Classification Using Multiple Class-based Denoising Autoencoders, Mixed Pixel Training Augmentation, and Morphological Operations
Jul 11, 2018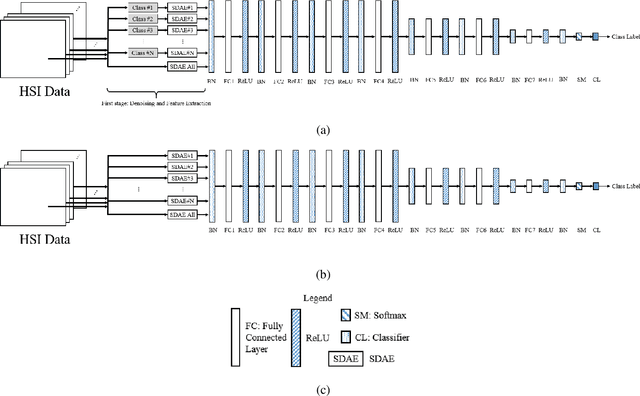
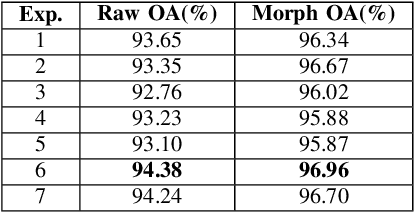
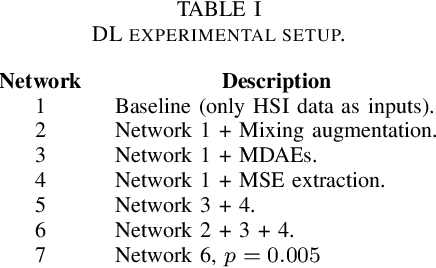
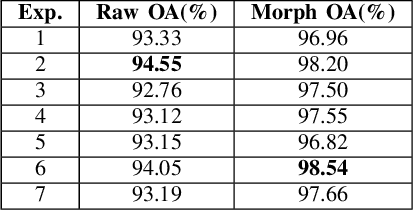
Herein, we present a system for hyperspectral image segmentation that utilizes multiple class--based denoising autoencoders which are efficiently trained. Moreover, we present a novel hyperspectral data augmentation method for labelled HSI data using linear mixtures of pixels from each class, which helps the system with edge pixels which are almost always mixed pixels. Finally, we utilize a deep neural network and morphological hole-filling to provide robust image classification. Results run on the Salinas dataset verify the high performance of the proposed algorithm.
State-of-the-art and gaps for deep learning on limited training data in remote sensing
Jul 11, 2018Deep learning usually requires big data, with respect to both volume and variety. However, most remote sensing applications only have limited training data, of which a small subset is labeled. Herein, we review three state-of-the-art approaches in deep learning to combat this challenge. The first topic is transfer learning, in which some aspects of one domain, e.g., features, are transferred to another domain. The next is unsupervised learning, e.g., autoencoders, which operate on unlabeled data. The last is generative adversarial networks, which can generate realistic looking data that can fool the likes of both a deep learning network and human. The aim of this article is to raise awareness of this dilemma, to direct the reader to existing work and to highlight current gaps that need solving.
* arXiv admin note: text overlap with arXiv:1709.00308
Fusion of an Ensemble of Augmented Image Detectors for Robust Object Detection
Mar 17, 2018



A significant challenge in object detection is accurate identification of an object's position in image space, whereas one algorithm with one set of parameters is usually not enough, and the fusion of multiple algorithms and/or parameters can lead to more robust results. Herein, a new computational intelligence fusion approach based on the dynamic analysis of agreement among object detection outputs is proposed. Furthermore, we propose an online versus just in training image augmentation strategy. Experiments comparing the results both with and without fusion are presented. We demonstrate that the augmented and fused combination results are the best, with respect to higher accuracy rates and reduction of outlier influences. The approach is demonstrated in the context of cone, pedestrian and box detection for Advanced Driver Assistance Systems (ADAS) applications.
Onion-Peeling Outlier Detection in 2-D data Sets
Mar 12, 2018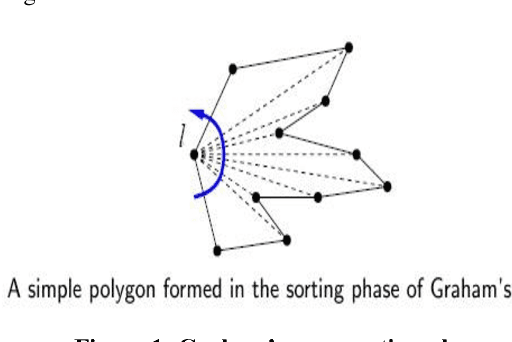
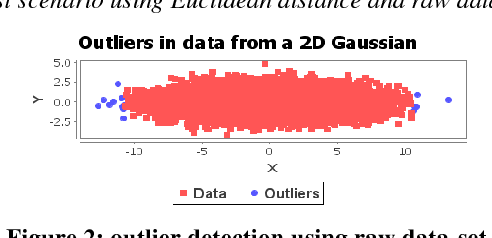
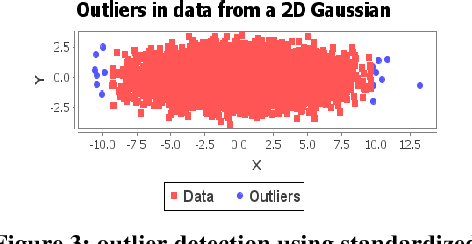
Outlier Detection is a critical and cardinal research task due its array of applications in variety of domains ranging from data mining, clustering, statistical analysis, fraud detection, network intrusion detection and diagnosis of diseases etc. Over the last few decades, distance-based outlier detection algorithms have gained significant reputation as a viable alternative to the more traditional statistical approaches due to their scalable, non-parametric and simple implementation. In this paper, we present a modified onion peeling (Convex hull) genetic algorithm to detect outliers in a Gaussian 2-D point data set. We present three different scenarios of outlier detection using a) Euclidean Distance Metric b) Standardized Euclidean Distance Metric and c) Mahalanobis Distance Metric. Finally, we analyze the performance and evaluate the results.
* 6 pages, 4 figures, journal paper
Measuring Conflict in a Multi-Source Environment as a Normal Measure
Mar 12, 2018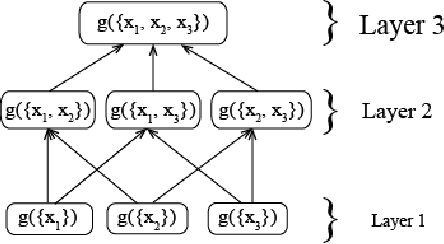
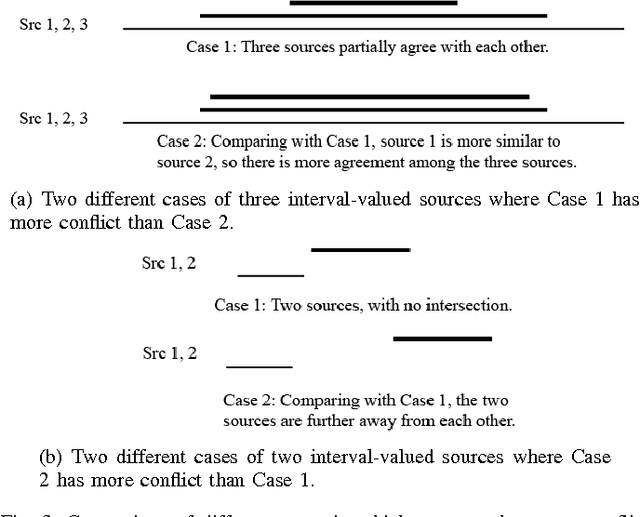
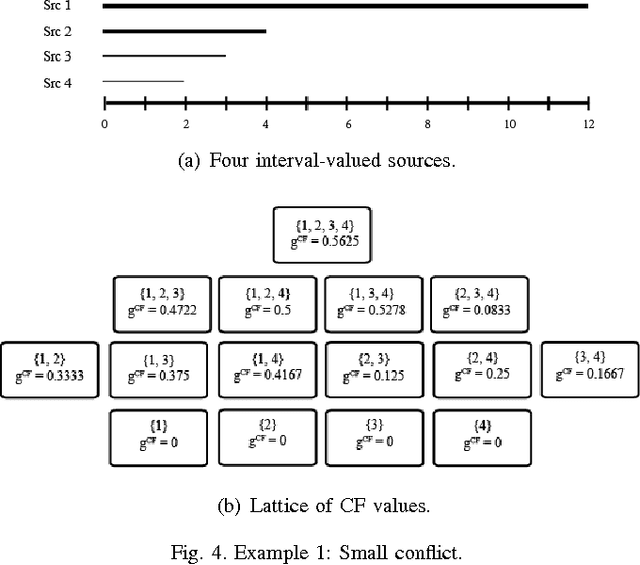
In a multi-source environment, each source has its own credibility. If there is no external knowledge about credibility then we can use the information provided by the sources to assess their credibility. In this paper, we propose a way to measure conflict in a multi-source environment as a normal measure. We examine our algorithm using three simulated examples of increasing conflict and one experimental example. The results demonstrate that the proposed measure can represent conflict in a meaningful way similar to what a human might expect and from it we can identify conflict within our sources.
* 4 pages, 8 figures, conference paper
Multi-Sensor Conflict Measurement and Information Fusion
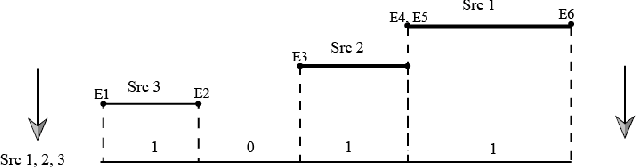
Mar 12, 2018In sensing applications where multiple sensors observe the same scene, fusing sensor outputs can provide improved results. However, if some of the sensors are providing lower quality outputs, the fused results can be degraded. In this work, a multi-sensor conflict measure is proposed which estimates multi-sensor conflict by representing each sensor output as interval-valued information and examines the sensor output overlaps on all possible n-tuple sensor combinations. The conflict is based on the sizes of the intervals and how many sensors output values lie in these intervals. In this work, conflict is defined in terms of how little the output from multiple sensors overlap. That is, high degrees of overlap mean low sensor conflict, while low degrees of overlap mean high conflict. This work is a preliminary step towards a robust conflict and sensor fusion framework. In addition, a sensor fusion algorithm is proposed based on a weighted sum of sensor outputs, where the weights for each sensor diminish as the conflict measure increases. The proposed methods can be utilized to (1) assess a measure of multi-sensor conflict, and (2) improve sensor output fusion by lessening weighting for sensors with high conflict. Using this measure, a simulated example is given to explain the mechanics of calculating the conflict measure, and stereo camera 3D outputs are analyzed and fused. In the stereo camera case, the sensor output is corrupted by additive impulse noise, DC offset, and Gaussian noise. Impulse noise is common in sensors due to intermittent interference, a DC offset a sensor bias or registration error, and Gaussian noise represents a sensor output with low SNR. The results show that sensor output fusion based on the conflict measure shows improved accuracy over a simple averaging fusion strategy.
* 15 pages, 9 figures, conference paper